 |
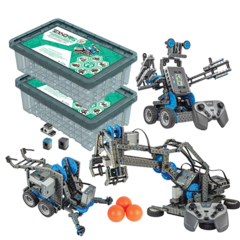
VEX IQ – это серия робототехники, созданная для самых маленьких учеников и их учителей. Школьники в возрасте от 8 лет могут легко собирать роботов с помощью этой легкой интуитивно понятной платформой. Учителям предоставляется бесплатная образовательная программа VEX IQ, чтобы дать ученикам ценные знания и навыки, необходимые в современном быстроразвивающемся мире. Задачи в программе VEX IQ, придуманные Фондом REC Foundation, дают возможность ученикам воодушевиться и загореться решением, а также получить важные знания в процессе решения. |
|
Простой, гибкий, мощный Структурные части VEX IQ соединяются и разъединяются без использования инструментов, что дает возможность быстро собирать и модифицировать робота. При помощи различных шестеренок, колес, соединительных элементов и т.д. можно выполнить окончательную доработку проекта и мобильного робота. Мозговой центр робота использует технологии с широкими функциональными возможностями и упрощает их до уровня пользователя, сохраняя высокий уровень. Можно подключить любую комбинацию портативных устройств (до 12 штук) к контроллеру робота, все они будут управляться встроенными программами или запрограммированным компьютером и совместимым программным обеспечением. В дополнение к заранее запрограммированным командам робот может управляться различными драйверами при помощи оператора. Датчики VEX IQ, которые включают в себя датчики света, гироскоп, датчик расстояния, помогут Вам создать уже более продвинутых роботов и дают больше возможностей для обучения. |
|


Предварительный уровень, 5-8 лет
Образовательный робототехнический модуль предназначается для проведения занятий в группах детей дошкольного возраста и младшего школьного возраста.
Характеристики
| Возраст: | 6-7 лет,8-9 лет |
| Категория Я.Маркет: | Конструкторы |
Начальный уровень, 9-12 лет
Образовательный робототехнический модуль способствует освоению базовых навыков в области проектирования и моделирования объектов у детей младшего школьного возраста (начальная школа).
Характеристики
| Возраст: | 8-9 лет,10-11 лет |
| Категория Я.Маркет: | Конструкторы |

Базовый уровень, 12-15 лет
Образовательный робототехнический модуль «Базовый уровень» представляет собой открытую платформу для создания робототехнических комплексов для образовательной, соревновательной и исследовательской деятельности.
Характеристики
| Возраст: | 12-14 лет,от 14 и старше |
| Категория Я.Маркет: | Конструкторы |

Профессиональный уровень, 14+ лет
Модуль предназначен для проведения занятий в классах углубленного изучения робототехники, а так же в рамках изучения информатики и досугового образования. Модуль аппаратно и конструктивно совместим с модулями «Начальный уровень» и «Базовый уровень».
Характеристики
| Возраст: | от 14 и старше |
| Категория Я.Маркет: | Конструкторы |

Исследовательский уровень, 14+ лет
Модуль предназначен для проведения занятий в классах углубленного изучения робототехники, а так же в рамках изучения информатики и досугового образования. Программно и конструктивно совместим с модулями «Начальный уровень», «Базовый уровень» и «Профессиональный уровень».
Характеристики
| Возраст: | от 14 и старше |
| Категория Я.Маркет: | Конструкторы |

АЭРО, 12-15 лет (Базовый)
Модуль предназначен для обучения школьников основам проектирования и управления современными системами воздушной робототехники, изучения основ программирования в специальной программной среде, экспериментальной исследовательской и соревновательной деятельности.
Характеристики
| Страна производитель: | Россия |
| Возраст: | 12-14 лет,от 14 и старше |

АЭРО, 12-15 лет (Спортивный)
Большой набор квадрокоптеров и аксессуаров для практического обучения полётам, проведения соревнований между учащимися и образовательным учреждениями. Специальное методическое пособие поможет обучиться пилотированию беспилотного летательного аппарата с нулевого уровня.
Характеристики
| Страна производитель: | Россия |
| Возраст: | 12-14 лет,от 14 и старше |

АЭРО, 12-15 лет (Программирование)
Образовательный набор дает практические знания управления и программирования квадрокоптеров. Используя этот квадрокоптер, у Вас будет возможность с легкостью научиться таким языкам программирования, как Scratch, Python и Swift.
Характеристики
| Страна производитель: | Россия |
| Возраст: | 12-14 лет,от 14 и старше |

Стартовый робототехнический набор «Базовый уровень Ардуино»
Стартовый робототехнический набор для индивидуальных занятий по изучению основ робототехники, проектирования и программирования роботов, реализации творческих инженерных проектов, а также создания робототехнических комплексов для задач образовательного и соревновательного характера.
Характеристики
| Возраст: | 10-11 лет,12-14 лет |

Конструктор модульных станков 6 в 1
Многофунциональный конструктор модульных станков обеспечивает сборку полноценно работающего устройства, позволяющего обрабатывать различные пластиковые, деревянные заготовки и заготовки из мягких цветных металлов так же, как это делают на больших промышленных станках аналогичного назначения.
Характеристики
| Возраст: | 8-9 лет,10-11 лет,12-14 лет |

Конструктор модульных станков 6 в 1 (металл)
Многофунциональный конструктор модульных станков, выполненный из металлических деталей, обеспечивает сборку полноценно работающего устройства, позволяющего обрабатывать различные пластиковые, деревянные заготовки и заготовки из мягких цветных металлов так же, как это делают на больших промышленных станках аналогичного назначения.
Характеристики
| Возраст: | 8-9 лет,10-11 лет,12-14 лет |
Ресурсный робототехнический модуль «Профессиональный уровень»
Напишите нам в мессенджеры
-
Telegram
-
Viber
-
Viber
-
WhatsApp
Подписка на новинки и акции:
Узнавайте о скидках и акциях первым
Новости магазина
Лего эдьюкейшн официальный сайт
-
Развивающие игрушки
-
Кабинет психолога
-
Мебель для детских садов
-
Учебные пособия
-
Отзывы
Наши контакты
+7 (499) 404-00-96
info@terminatori.ru
Москва, шоссе Энтузиастов 5 ст1
Режим работы: Пн-Пт с 08:00 до 18:00
Учебно-методические пособия
ПРЕДВАРИТЕЛЬНЫЙ УРОВЕНЬ
 |
В пособии представлены материалы по детскому конструированию с использованием образовательного робототехнического конструктора для образовательной деятельности и игр с детьми старшего дошкольного возраста. Примеры по организации занятий, логические задачи, задания, формирующие у ребенка социально-коммуникативное, познавательное, речевое, физическое развитие. |
 |
Рабочая тетрадь разработана для детей старшего дошкольного возраста и соответствует ФГОС ДОО. |
 |
В рабочей тетради представлено продолжение изложения краткого теоретического материала по объектам окружающего мира, технологические карты по работе с образовательным робототехническим конструктором, логические задачи, задания. Тетрадь предназначена для работы взрослых с детьми. |
НАЧАЛЬНЫЙ УРОВЕНЬ
 |
Пособие рассказывает о методах и примерах работы с образовательным конструктором VEX IQ, его использовании на уроках технологии, математики и информатики, а также во внеурочной деятельности. Пособие адресовано учителям начальной и основной школы, ведущим курсы технологии, информатики, физики. |
 |
Данное пособие предназначено для применения совместно с образовательным робототехническим модулем «Начальный уровень». В книге описываются возможности робототехнического модуля и области его применения. Пособие содержит информацию о назначении робототехнического набора и описание процесса сборки робота. |
 |
Данное пособие было разработано в качестве дополнения к образовательной платформе VEX IQ для учащихся начальной и основной школы. Данное пособие включает 12 инструкций, которые могут использоваться последовательно, частями, а также в качестве отдельных занятий, чтобы открыть для себя мир естественных наук, технологий, инженерии и математики. |
БАЗОВЫЙ УРОВЕНЬ
 |
Данное пособие предназначено для применения совместно с образовательным робототехническим модулем «Базовый уровень», созданным на базе робототехнического конструктора VEX EDR. В пособии описываются состав и функциональные возможности робототехнического модуля и примеры его применения. Пособие содержит информацию о назначении модуля и элементов, входящих в его состав, а также о возможностях применения данного модуля в образовательном процессе в средних и старших классах. Модуль оснащён программируемым контроллером, представляющим собой открытую программно-аппаратную платформу, преемственную с программируемыми контроллерами типа Arduino. |
 |
Предлагаемое пособие содержит сведения о конструировании роботов, начальные сведения о языке С, дает разбор основных алгоритмов управления. Оно поможет организовать проектную деятельность в образовательных организациях. Пособие предназначено педагогам, учащимся старших классов, студентам технических вузов. Оно будет интересно всем, кто интересуется и занимается робототехникой самостоятельно. Это пособие построено как справочник, в который Вы можете заглянуть для решения какой-либо практической задачи робототехники. В каждом параграфе приведены задачи, которые возможно использовать для построения учебного процесса на основе уже изученного материала. |
ПРОФЕССИОНАЛЬНЫЙ УРОВЕНЬ
 |
Пособие содержит информацию о назначении робототехнического набора и описание работ по проектированию роботов и робототехнических устройств, которые можно провести совместно с учащимися среднего школьного возраста. Пособие раскрывает базовые теоретические основы функционирования роботов, а также содержит справочную информацию по программированию систем управления роботов и робототехнических устройств, основы обработки информации и показаний датчиков. Применение образовательного робототехнического модуля «Профессиональный уровень» позволяет привить учащимся навыки и основы профессионального подхода к решению технически сложных проблем, проведения системного анализа. |
 |
В пособии описывается процесс конструирования роботов и робототехнических устройств на базе робототехнического набора. Образовательный робототехнический модуль предназначен для обучения основам робототехники учащихся среднего школьного возраста. С помощью данного пособия учащиеся могут конструировать модели различных роботов или робототехнические устройства самостоятельно или в группах под руководством преподавателя. Применение образовательного робототехнического модуля позволяет продемонстрировать учащимся базовые основы конструирования и разработки систем управления роботов в наглядной игровой форме. |
ИССЛЕДОВАТЕЛЬСКИЙ УРОВЕНЬ
 |
Пособие содержит информацию о назначении робототехнического набора и описание работ по проектированию роботов и робототехнических устройств, которые можно провести совместно с учащимися среднего и старшего школьного возраста. |
 |
Пособие демонстрирует наиболее яркие примеры проектов и работ, которые становится возможным реализовать благодаря применению образовательного робототехнического модуля «Исследовательский уровень». |
 |
Данное пособие предназначено для применения совместно с образовательным робототехническим модулем «Исследовательский уровень» ресурсный набор. В пособии описываются возможности робототехнического модуля и области его применения. |
 |
Данное пособие предназначено для применения совместно с образовательным робототехническим модулем «Исследовательский уровень» ресурсный набор. В пособии описываются возможности робототехнического модуля и области его применения. |
ЭКСПЕРТНЫЙ УРОВЕНЬ
 |
Данное пособие предназначено для применения совместно с образовательным робототехническим модулем «Экспертный уровень». В пособии описываются возможности робототехнического модуля и области его применения. Данное пособие содержит детальную информацию, описывающую процесс работы с комплектующими, входящими в состав модуля, приводит примеры по подключению различных устройств и исполнительных механизмов, обработке сенсорной информации, а также основы работ с базовыми средами программирования и примеры программ, реализующих простейшие операции. Приведенная информация позволяет облегчить процесс подготовки преподавателя и учащихся к работе с образовательным робототехническим модулем. |
 |
В пособии содержится справочная информация по работе с комплектующими, входящими в состав образовательного робототехнического модуля, с помощью которых можно разрабатывать роботов на базе различных шасси, оснащенных различными захватными механизмами и сенсорными устройствами. В качестве дополнительных рекомендаций приводится инструкция по сборке четырех различных мобильных роботов на базе шасси с различной кинематической схемой. Пользователь может доработать любые комплектующие и разработать множество различных механизмов в соответствии с собственным проектом. |
КОНСТРУКТОР МОДУЛЬНЫХ СТАНКОВ
 |
Пособие знакомит с портативными многофункциональными модульными станками, а также с технологией моделирования различных изделий, для изготовления которых могут использоваться такие станки. В пособии даются описания двух комплектов, позволяющих собрать шесть разных станков из деталей одного комплекта и восемь разных станков из деталей второго комплекта. Подробно описаны преимущества использования подобных станков, процессы сборки устройств, особенности эксплуатации, даны рекомендации по правилам использования и технике безопасности. В приложении предлагаются инструкции по моделированию и использованию различных изделий. |
 Турицын Андрей Олегович, ученик 9 класса, Муниципальное общеобразовательное учреждение «Лицей №23», город Подольск, Московская область.
Турицын Андрей Олегович, ученик 9 класса, Муниципальное общеобразовательное учреждение «Лицей №23», город Подольск, Московская область.
 Руководитель: Веремий Ирина Александровна, учитель физики и информатики, Муниципальное общеобразовательное учреждение «Лицей №23», город Подольск, Московская область.
Руководитель: Веремий Ирина Александровна, учитель физики и информатики, Муниципальное общеобразовательное учреждение «Лицей №23», город Подольск, Московская область.
ТЕХНИЧЕСКИЕ ВОЗМОЖНОСТИ РОБОТА-МАНИПУЛЯТОРА, СОБРАННОГО НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОНСТРУКТОРА VEX EDUCATIONAL ROBOTICS
Технические возможности робота-манипулятора, собранного на базе робототехнического конструктора VEX EDUCATIONAL ROBOTICS
Введение
Современный мир невозможно представить без роботов. Трудно назвать такую сферу человеческой деятельности, где не были бы задействованы различные автоматизированные устройства, призванные выполнить за человека сложную, опасную и просто рутинную работу. Эти автоматические устройства, созданные для различных целей – образовательных, производственных, развлекательных и др.,- уверенно входят в нашу жизнь. Теперь робот – это не фантастика, не мечта, а реальность. Робот-пылесос помогает с уборкой, летающий робот-беспилотник охраняет границы страны, робот-хирург помогает выполнить точную операцию.
Цель нашего проекта заключается в практическом создании робота-манипулятора, его испытании и исследовании технических возможностей.
Актуальность вопросов, связанных с использованием роботов вызвана тем, что для лучшего понимания перспектив развития робототехники и применения роботов в будущем, современным людям уже сегодня нужно активно осваивать такое понятие как робот, знать, как и из чего роботы собираются, каких типов бывают и для чего используются, как и с помощью чего управляются.
Задачи:
1. изучить научно-популярную литературу по использованию роботов-манипуляторов для определения современного уровня развития и практического применения роботов данного типа;
2. изучить инструкции фирмы-разработчика и выполнить сборку робота-манипулятора, на базе робототехнического конструктора VEX EDUCATIONAL ROBOTICS;
3. настроить управляющую программу на микроконтроллер робота;
4. провести испытания и исследовать технические возможности робота-манипулятора.
Гипотеза: Можно создать робототехническое устройство на базе VEX EDUCATIONAL ROBOTICS, выполняющее действия, которые может выполнять человек.
Методы исследования:
- изучение литературных источников и электронных ресурсов;
- практическая деятельность: конструирование и испытание робототехнического устройства.
Объект исследования: робот-манипулятор, собранный на базе робототехнического конструктора VEX EDUCATIONAL ROBOTICS.
Предмет исследования: сборка, испытание и исследование технических возможностей робота-манипулятора.
Глава 1. Роботы-манипуляторы: устройство, назначение и практическое использование
Роботы – автоматические системы, предназначенные для воспроизведения интеллектуальных и двигательных функций человека и/или других живых существ. От традиционных автоматов отличаются большей универсальностью и способностью к адаптации на выполнение различных задач, в том числе в изменяющейся обстановке.
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства.
В настоящее время робототехника превратилась в развитую область промышленности: тысячи промышленных роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта.
С развитием робототехники определились три разновидности роботов:
- с жёсткой программой действий;
- манипуляторы, управляемые человеком-оператором;
- с искусственным интеллектом, действующие целенаправленно без вмешательства человека. [1]
Большинство современных роботов — это роботы-манипуляторы. Они представляют собой аппараты, которые способны эффективно сотрудничать с другим дополнительным оборудованием увеличивая его КПД в несколько раз.
Устройство робота-манипулятора
Современные манипуляторные машины имеют в своей конструкции несколько подвижных осей, благодаря чему звенья манипулятора подвижны друг относительно друга и могут совершать вращательные и поступательные движения. Последним звеном манипулятора может быть захват-клешня или какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. Перемещение звеньев манипулятора обеспечивают так называемые приводы — аналоги мускулов в руке человека. Обычно в качестве таковых используются электродвигатели. Кроме электрического часто применяются гидравлический или пневматический приводы.[3]
Управление роботом-манипулятором, то есть механической рукой, выполняется оператором. Осуществляется это с помощью автономного пульта со специальным программным обеспечением. Оператор имеет возможность наблюдать за процессом работы робота как собственными глазами, так и на специальном мониторе, через транслирующую камеру, если робот снабжен передающей видеокамерой.
Работа робота-манипулятора напоминает движение человеческой руки, однако, такая техника имеет множество преимуществ по сравнению с человеком.
В первую очередь, при работе в автоматическом режиме робот способен обеспечить безупречную точность и высокую скорость выполнения большого числа однообразных манипуляций. Так, промышленный робот может передвигать детали массой до нескольких десятков килограмм в радиусе действия его «механических рук» (до 2 м), выполняя от 200 до 1000 перемещений в час.
Во-вторых, благодаря широким возможностям, данные роботы стали незаменимы при работе в тяжёлых условиях, например в атомной промышленности, где они применяются с 50-х годов. Для подводных работ используются роботы-манипуляторы самых разнообразных конструкций и назначений: от глубоководных управляемых аппаратов с «механическими руками» (в частности, для захвата образцов породы со дна моря) и ползающих по морскому дну платформ с исследовательской аппаратурой до подводных бульдозеров и буровых установок. Подобные манипуляторы применяются и в космонавтике, например роботы-планетоходы, исследующие Луну и Марс. [2]
В наши дни роботы-манипуляторы в основном востребованы в промышленности, где без механических рук не обходится производство автомобилей и другой техники.
Таким образом, основное предназначение робота-манипулятора сводится к замене человека при выполнении широкого круга производственных операций.
Глава 2. Принципы построения роботов на базе конструктора Vex EDUCATIONAL ROBOTICS
Система проектирования VEX Robotics разработана компанией американской компанией Innovation First Inc. (Приложение 1. Робототехнический конструктор Vex EDUCATIONAL ROBOTICS)
Инновационный подход VEX, предусматривающий применение стандартных заготовок и металлических конструкций в сочетании с мощным программируемым микропроцессором, позволяет реализовать множество проектных решений.
Основу любого робота составляют четыре базовых компонента: тело/рама, система управления, манипуляторы и ходовая часть.
Рассмотрим, как реализованы данные компоненты в системе проектирования VEX. Разработчики VEX разделили основную систему на несколько подсистем.
1. Подсистема конструкции: все металлические, крепежные и конструктивные/механические пластиковые части.
Части подсистемы конструкции формируют базу робота, являются его «скелетом», к которому присоединяются все остальные части. Подсистема включает все основные конструктивные, металлические элементы и крепежные детали. Эти элементы, соединяясь вместе, образуют раму робота. Подсистемы конструкции и движения очень тесно взаимосвязаны, они формируют шасси робота. Одним из ключевых свойств большинства конструктивных элементов VEX является их гибкость, а также возможность обрезки до нужной длины. Пользователи могут легко модифицировать эти части в соответствии с потребностями проекта.
2. Подсистема движения: электромоторы, датчики, передачи, звездочки и цепи, танковые гусеницы и сопряженные элементы.
Данная подсистема включает все компоненты, обеспечивающие перемещение робота. Эти компоненты имеют исключительное значение в рамках конструкции робота. В системе проектирования VEX, компоненты движения легко интегрируются между собой. Это позволяет легко создавать сложные системы с помощью базовых конструкционных блоков. Базовой концепцией подсистемы движения является использование квадратных осей. Большая часть элементов движения VEX имеют втулку с квадратной вставкой, за счет чего обеспечивается их надежная установка на квадратной оси VEX. С помощью системы «квадратное отверстие/квадратная ось» осуществляется передача крутящего момента без необходимости применения громоздких воротников или зажимов для удерживания круглого вала. Ключевым элементом системы движения является исполнительный механизм (привод — элемент, побуждающий механическую систему к движению). В системе проектирования VEX, существует несколько вариантов приводов. Наиболее распространенными типами являются электромотор непрерывного вращения VEX и серво VEX. Электромоторы способны непрерывно вращаться, а диапазон вращения серво ограничен 150 градусами.
3. Подсистема мощности: батареи, зарядные устройства и сопряженные элементы.
Мощность — необходимое условие работы все электронных частей робота, в том числе контроллеров и электромоторов. Если подсистема конструкции — это скелет робота, а подсистема движения — его мускулы, то подсистема мощности является циклической системой обеспечения робота энергией. Для электропитания робота предусмотрен комплект батарей на 7,2 В. Джойстик VEXnet работает на шести батареях типа ААА.
4. Подсистема датчиков: бамперный и ограничительный переключатель, ультразвуковые, линейные датчики, датчики положения вала, потенциометры.
Подсистема датчиков позволяет роботу идентифицировать различные объекты и явления внешней среды. Датчики — это «глаза» и «уши» робота, обеспечивающие его автономную работу, не требующую вмешательства со стороны человека. Робот улавливает изменения внешней среды и изменяет собственное поведение на основании полученных данных. Датчик отправляет роботу отклик на простые события внешней среды, интерпретация которых производится программой робота, после чего программа определяет вариант реакции. В системе проектирования VEX существует множество датчиков. Это и ультразвуковые дальномеры, гироскопические датчики, световые и оптические датчики и многие другие.
5. Подсистему логики: микроконтроллер, ШИМ-кабели, наборы для программирования.
Главным элементом подсистемы логики является микроконтроллер VEX. Микроконтроллер — это центральный компонент элемент всей системы VEX, так как с его помощью производится координирование работы подсистем и управление всеми компонентами. Подсистема логики — это мозг робота. Микроконтроллер VEX Cortex выпускается с исходным программным обеспечением, благодаря чему пользователи могут использовать его сразу после приобретения. Возможно выполнение быстрой настройки исходного кода с помощью перемычек контактов. Для расширения возможностей управления может использоваться пользовательский программный код.
6. Подсистему управления: джойстик, передатчик, ресивер, кристаллы, распределитель сигналов, тетеринговые кабели.
Подсистема управления позволяет вручную управлять действиями робота. Отправка команд осуществляется с помощью ручек управления и кнопок джойстика VEXnet по беспроводному соединению. Таким образом, управление роботом может осуществляться как ручным, так и автономным методами. Джойстик VEXnet позволяет оператору управлять действиями робота в режиме реального времени через инновационное беспроводное соединение VEXnet. Джойстик снабжен двумя аналоговыми ручками, работающими в двух направлениях, четырьмя пусковыми кнопками и двумя навигационными панелями с четырьмя кнопками. [4]
Глава 3. Исследование технических возможностей робота-манипулятора, собранного на базе робототехнического конструктора VEX EDUCATIONAL ROBOTICS
В результате работы над проектом, руководствуясь пошаговыми инструкциями к конструктору, нами была произведена механическая сборка робота–манипулятора, снабженного клешней. В качестве модели мы выбрали робота базовой модели CLAWBOT. (Приложение 2. Робот-манипулятор VEX модельи CLAWBOT – результат сборки)
Следующим этапом работы было испытание и исследование технических возможностей собранного робота.
Результаты испытания технической готовности
Робот, управляемый оператором с пульта дистанционного управления (джойстика) выполнял следующие команды:
- движение с регулируемой скоростью вперед;
- движение с регулируемой скоростью назад;
- поворот в движении направо;
- поворот в движении налево;
- повороты направо, налево и полный разворот на месте;
- регулируемый подъем/опускание «механической руки»;
- смыкание/размыкание клешни манипулятора.
Все поставленные задачи робот выполнил требуемыми способами, действовал без задержек, легко управлялся с пульта оператором.
На следующем этапе, используя ресурсы школьного кабинета физики, мы приступили к изучению технических характеристик робота. (Приложение 3. Испытание и исследование технических возможностей робота).
Нами были получены следующие результаты:
1. зона действия пульта дистанционного управления — ≈ 20 м.
2. сила сдавливания клешни манипулятора – ≈ 25 Н;
3. сила тяги, развиваемая электромотором – ≈14 Н;
4. максимальный вес, удерживаемый поднятой клешней — ≈1кг;
5. максимальный угол подъема при движении вверх по наклонной поверхности — ≈200;
6. максимальная скорость при движении вперед — ≈1,32 м/с;
7. максимальная скорость при движении назад (задний ход)- ≈ 1,39 м/с.
Робот также был испытан на предмет своего прямого назначения – выполнение различных технических задач, поставленных оператором. (Приложение 4. Выполнение роботом различных технических задач) А именно:
1. робот успешно прошел полосу препятствий из игровых кубиков, установленных на расстоянии 1 м друг от друга;
2. робот успешно произвел захват цели в виде пластиковой бутылки, переместил ее на несколько метров и опустил в урну;
3. робот, с зажатым в клешне маркером, «рисовал» вертикальные полосы на доске, прикрепленной к стене;
4. робот, собрал вертикальную пирамидку из трех разбросанных игровых кубиков.
Также данный робот в январе 2017г. принял участие в IV региональном Фестивале точных наук «Особые точки» в г. Серпухове Московской области. где его возможности были продемонстрированы в «Мастер-классе» и «Турнире роботов». Авторы робота стали призерами данного фестиваля. (Приложение 5. Участие в соревновании роботов на Фестивале «Особые точки» г. Серпухов).
Заключение
Исходя из приведенных данных, можно уверенно сказать о большой важности робототехники для всех сфер жизнедеятельности человека. Достижения в этой области не перестают поражать воображения обычных обывателей. Современные роботы используются во всех отраслях – на производстве, в освоении космоса, здравоохранении, общественной безопасности, развлекательных целях, обороне и многом другом. Роботы расширяют наше понимание во многих областях науки, увеличивают наши возможности, позволяют узнавать новое там, где возможности человека ограничены.
Особое место в семействе современных роботов занимают, так называемые роботы-манипуляторы, активно используемые на производстве. Робот-манипулятор – это технически сложный элемент, состоящий из нескольких звеньев, соединенных сервоприводами и оснащенный различными датчиками. Манипулятор предназначен для перемещения объектов в рабочей зоне, доступной «механической руке».
Роботов-манипуляторов отличают высокая производительность труда, они не требуют времени на отдых, никогда не ошибаются, им не страшны тяжелые и опасные условия труда. Они позволяют существенно снижать риск производственного травматизма.
Изучив литературные источники по робототехнике, мы узнали, что основу любого робота составляют четыре базовых компонента: тело/рама, система управления, манипуляторы и ходовая часть. Разработчики робототехнического оборудования используют различные технические решения для реализации роботов того или иного назначения.
В ходе данного исследования мы подтвердили свою гипотезу о том, что робот-манипулятор может заменить человека при выполнении некоторых действий: захватывать, удерживать, поднимать, опускать и перемещать предметы.
Робототехника сегодня является новой перспективной областью техники. Её успешное освоение становится важным фактором развития современного общества. С момента своего появления роботы прошли путь от примитивных механизмов до сложных, эффективных устройств, во многом превосходящих по своим возможностям человека. Роботы уверенно вошли в нашу жизнь и стали её реальностью. Новый виток технического прогресса требует образованности всех членов современного общества в областях новых высоких технологий, к которым относятся и технологии создания робототехнических устройств и управления ими.
Список литературы и электронных источников
1. Портал «Био-ника» [Электронный ресурс] : база данных. — Режим доступа: http://bio-nica.narod.ru/page6.html
2. Центральный металлический портал РФ [Электронный ресурс] : Роботы манипуляторы — универсальное устройство 21 века — Режим доступа: http://metallicheckiy-portal.ru/articles/oborydovanie/roboti/roboty-manipulyatory—universalnoe-ustroystvo-21-veka
3. Образовательный портал IQ coaching [Электронный ресурс] : Промышленный робот — Режим доступа: http://www.iq-coaching.ru/razvitie-mashinostroeniya/mashiny-i-mehanizmy/59.html
4. ООО «Экзамен-Технолаб» — авторизованный дистрибьютор продукции Vex на территории Российской Федерации, Республики Беларусь и Казахстана [Электронный ресурс] : Система проектирования VEX Robotics- Режим доступа: http://vex.examen-technolab.ru/lessons/unit_2_introduction_to_robotics/45/
5. Портал «Занимательная робототехника» [Электронный ресурс] : — Режим доступа: http://edurobots.ru/
6. Портал «Техническая планета» [Электронный ресурс] Робототехника : — Режим доступа: http://tehplaneta.ru/category/robototekhnika
7.База знаний «ALLBEST» [Электронный ресурс] Механические руки : — Режим доступа: http://knowledge.allbest.ru/programming/3c0a65635b3ac78a4d43b89421216d37_0.html
ПРИЛОЖЕНИЕ


Начинаем публиковать серию видеоуроков по робототехнике на основе конструктора VEX IQ. Учебный курс ориентирован на начинающих и не требует специальных входных знаний. Автор — преподаватель робототехники Олег Горнов. Сегодня — первый вводный урок в серии, он посвящен возможностям конструктора и соревнованиям VEX IQ 2017.

Почему именно VEX IQ?
- В этом году принято решение проводить соревнования JuniorSkills не только в России, но и на международном уровне. Официальной платформой этих соревнований станет VEX IQ.
- Собственные соревнования VEX являются крупнейшими в мире и собирают более 1000 команд со всего мира.
- VEX IQ – очень удачное образовательное решение, которое позволяет, с одной стороны, показать все базовые принципы робототехники, с другой — воплощать в реальности и оживлять свои самые смелые идеи.

К преимуществам VEX IQ относятся:
- Надежная конструктивная база, которая позволяет создавать достаточно большие конструкции, которые при этом сохраняют жесткость и прочность.

- Возможность одновременно использовать двенадцать датчиков и двигателей.

- Наличие пульта управления позволяет создавать управляемых роботов, а также значительно разнообразит учебный процесс.

- Для реализации автономного поведения робота возможно использовать датчики расстояния, цвета, касания и пр.

- В конструкторе VEX IQ используются металлические оси и валы, что значительно расширяет его возможности и повышает точность движений.

- Зубчатые колеса и рейки, шкивы, цепи позволяют изучать широкий перечень механизмов.

Наши видеоуроки раскрывают образовательные возможности роботоконструктора VEX IQ и затрагивают такие темы, как построение устойчивых и прочных конструкций, преобразование энергий, простые и сложные механизмы, конструирование мобильных роботов, построение манипуляторов, элементы теории управления и пр.
Урок 1 посвящен возможностям конструктора VEX IQ. В этом уроке рассматриваем соревнования VEX IQ 2017 года.
Все уроки:
- Урок 1: возможности конструктора.
- Урок 2: состав набора.
- Урок 3: принципы конструирования.
- Урок 4: устойчивость.
- Урок 5: энергия.
- Урок 6: резиномотор.
- Урок 7: основной принцип механики.
- Урок 8: топор из конструктора.
- Урок 9: рычаги.
- Урок 10: какие бывают рычаги.
- Урок 11: зубчатые передачи.
- Урок 12: комбинации зубчатых передач.
- Урок 13: мультиплексор для запуска волчка.
- Урок 14: ременные передачи.
- Урок 15: цепные передачи.
- Урок 16: сборка и улучшение тележки.
- Урок 17: первичная настройка робота.
- Урок 18: бесплатная установка и настройка Robot C.
- Урок 19: первая программа в RobotC.
- Урок 20: ваши манеры программирования.
- Урок 21: передний, задний или полный привод?
- Урок 22: Программирование робота в простом лабиринте.
- Урок 23: Циклы в RobotC.
- Урок 24: Ветвления в RobotC.
- Урок 25: Простейшее управление роботом с пульта.
- Урок 26: Программирование роботов и двоичное кодирование. Switch-Case в RobotC.
- Урок 27: Использование функций при программировании роботов.
- Урок 28: Программирование пульта управления роботом на основе линейной функции.
- Урок 29: Управление роботом на одном стике с пульта.
- Урок 30: Управление скоростью вращения двигателя.
Об авторе
Олег Горнов — доцент МГПУ, кандидат физико-математических наук, тренер сборной России по робототехнике, автор книг, лауреат всероссийского конкурса мастерства педагогов дополнительного образования «Сердце отдаю детям».
Теги: headline, VEX, VEX IQ, видео, конструктор, Олег Горнов, робот конструктор, уроки