4.1. Движение по окружности с постоянной скоростью.
Движение по окружности — простейший вид криволинейного движения.
4.1.1. Криволинейное движение — движение, траекторий которого является кривая линия.
Для движения по окружности с постоянной скоростью:
1) траектория движения — окружность;
2) вектор скорости направлен по касательной к окружности;
3) вектор скорости постоянно меняет свое направление;
4) за изменение направления скорости отвечает ускорение, называемое центростремительным (или нормальным) ускорением;
5) центростремительное ускорение меняет только направление вектора скорости, при этом модуль скорости остается неизменным;
6) центростремительное ускорение направлено к центру окружности, по которой происходит движение (центростремительное ускорение всегда перпендикулярно вектору скорости).
4.1.2. Период (T) — время одного полного оборота по окружности.
Это величина постоянная, так как длина окружности постоянная и скорость движения постоянна

4.1.3 Частота  — число полных оборотов за 1 с.
— число полных оборотов за 1 с.

По сути, частота отвечает на вопрос: как быстро вращается тело?
4.1.4. Линейная скорость — показывает, какой путь проходит тело за 1 с (это та же самая скорость, о которой говорилось в предыдущих темах)

где R — радиус окружности.
4.1.5. Угловая скорость  показывает, на какой угол поворачивается тело за 1 с.
показывает, на какой угол поворачивается тело за 1 с.

где  — угол, на который повернулось тело за время
— угол, на который повернулось тело за время 
4.1.6. Центростремительное ускорение 

Напомним, что центростремительное ускорение отвечает только за поворот вектора скорости. При этом, так как скорость постоянная величина, то значение ускорения тоже постоянно.
4.1.7. Закон изменения угла поворота

Это полный аналог закона движения при постоянной скорости :

Роль координаты x играет угол  роль начальной координаты
роль начальной координаты  играет
играет  скорость
скорость  — угловая скорость
— угловая скорость  И с формулой
И с формулой следует работать так же, как ранее работали с формулой закона равномерного движения.
следует работать так же, как ранее работали с формулой закона равномерного движения.
4.2. Движение по окружности с постоянным ускорением.
4.2.1. Тангенциальное ускорение
Центростремительное ускорение отвечает за изменение направления вектора скорости, но если еще меняется и модуль скорости, то необходимо ввести величину отвечающую за это — тангенциальное ускорение 

Из вида формулы  ясно, что
ясно, что  — это обычное ускорение, о котором говорилось раньше. Если
— это обычное ускорение, о котором говорилось раньше. Если  то справедливы формулы равноускоренного движения:
то справедливы формулы равноускоренного движения:


где S — путь, который проходит тело по окружности.
Итак, еще раз подчеркнем, отвечает за изменение модуля скорости.
4.2.2. Угловое ускорение
Мы ввели аналог скорости для движения по окружности — угловая скорость. Естественно будет ввести и аналог ускорения — угловое ускорение 

Угловое ускорение связано с тангенциальным ускорением:

Из формулы  видно, что если тангенциальное ускорение постоянно, то и угловое ускорение будет постоянно. Тогда можем записать:
видно, что если тангенциальное ускорение постоянно, то и угловое ускорение будет постоянно. Тогда можем записать:

Формула  является полным аналогом закона равнопеременного движения, поэтому работать с этой формулой мы уже умеем.
является полным аналогом закона равнопеременного движения, поэтому работать с этой формулой мы уже умеем.
4.2.3. Полное ускорение
Центростремительное (или нормальное) и тангенциальное ускорения не являются самостоятельными. На самом деле, это проекции полного ускорения на нормальную (направлена по радиусу окружности, то есть перпендикулярно скорости) и тангенциальную (направлена по касательной к окружности в сторону, куда направлен вектор скорости) оси. Поэтому

Нормальная и тангенциальные оси всегда перпендикулярны, следовательно, абсолютно всегда модуль полного ускорения можно найти по формуле:

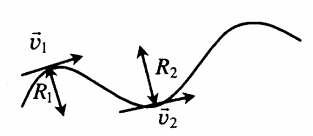
4.4. Движение по криволинейной траектории.
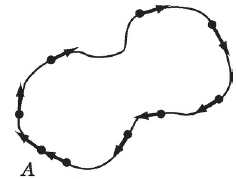
Движение по окружности является частным видом криволинейного движения. В общем случае, когда траектория представляет собой произвольную кривую (см. рис.), всю траекторию можно разбить на участки: AB и DE — прямолинейные участки, для которых справедливы все формулы движения по прямой; а для каждой участка, который нельзя рассмотреть как прямую, строим касательную окружность (окружность, которая касается траектории только в этой точке) — в точках C и D. Радиус касательной окружности называется радиусом кривизны. В каждой точке траектории радиус кривизны имеет свое значение.
Формула для нахождения радиуса кривизны  :
:

где  — нормальное ускорение в данной точке (проекция полного ускорения на ось, перпендикулярную вектору скорости).
— нормальное ускорение в данной точке (проекция полного ускорения на ось, перпендикулярную вектору скорости).
Криволинейное движение. Движение по окружности. Угловая скорость. Период и частота обращения. Ускорение тела при движении по окружности. Тангенциальное и нормальное ускорение.
Криволинейное движение — механическое движение, траектория которого — кривые линии с произвольным ускорением и произвольной скоростью.
Движение тела по окружности — частный случай криволинейного движения.
Угловая скорость — величина, характеризующая скорость вращения материальной точки вокруг центра вращения. [fbox {$omega=dfracvarphi t=dfrac{2pi}{t}$}]
Единицы измерения: (displaystyle [frac{text{рад}}{c}]) (радиан в секунду).
Период обращения — это время одного полного оборота.
Единицы измерения: (displaystyle [text{c}]) (секунда)
Частота обращения — это величина, обратная периоду. Частота показывает, сколько полных оборотов совершает материальная точка за секунду. [fbox {$nu=dfrac1T$}]
Единицы измерения: (displaystyle [text{об}/text{с}]) (оборот в секунду), (displaystyle [text{Гц}]) (Герц).
Тангенциальное ускорение — компонента ускорения, направленная по касательной к траектории движения.
Единицы измерения: (displaystyle [text{м}/text{с}^2]) (метр в секунду за секунду).
Нормальное (центростремительное) ускорение — компонента ускорения, характеризующая быстроту изменения направления вектора скорости для траектории с кривизной, направленное к центру кривизны траектории. [fbox{$a_text{цс}=dfrac{v^2}{r}$}] Единицы измерения: (displaystyle [text{м}/text{с}^2]) (метр в секунду за секунду).
Полное ускорение тела, движущегося по окружности равно векторной сумме тангенциального и нормального ускорений. [fbox{$overrightarrow a_text{полн}=overrightarrow a_text{тан}+overrightarrow a_text{цс}$}]
Движение по окружности с постоянной по модулю скоростью
теория по физике 🧲 кинематика
Криволинейное движение — движение, траекторией которого является кривая линия. Вектор скорости тела, движущегося по кривой линии, направлен по касательной к траектории. Любой участок криволинейного движения можно представить в виде движения по дуге окружности или по участку ломаной.
Движение по окружности с постоянной по модулю скоростью — частный и самый простой случай криволинейного движения. Это движение с переменным ускорением, которое называется центростремительным.
Особенности движения по окружности с постоянной по модулю скоростью:
- Траектория движения тела есть окружность.
- Вектор скорости всегда направлен по касательной к окружности.
- Направление скорости постоянно меняется под действием центростремительного ускорения.
- Центростремительное ускорение направлено к центру окружности и не вызывает изменения модуля скорости.
Период, частота и количество оборотов
Пусть тело двигается по окружности беспрерывно. Когда оно сделает один оборот, пройдет некоторое время. Когда тело сделает еще один оборот, пройдет еще столько же времени. Это время не будет меняться, потому что тело движется с постоянной по модулю скоростью. Такое время называют периодом.
Период — время одного полного оборота. Обозначается буквой T. Единица измерения — секунды (с).

t — время, в течение которого тело совершило N оборотов
За один и тот же промежуток времени тело может проходить лишь часть окружности или совершать несколько единиц, десятков, сотен или более оборотов. Все зависит от длины окружности и модуля скорости.
Частота — количество оборотов, совершенных в единицу времени. Обозначается буквой ν («ню»). Единица измерения — Гц.
N — количество оборотов, совершенных телом за время t.
Период и частота — это обратные величины, определяемые формулами:
Количество оборотов выражается следующей формулой:
Пример №1. Шарик на нити вращается по окружности. За 10 секунд он совершил 20 оборотов. Найти период и частоту вращения шарика.
Линейная и угловая скорости
Линейная скорость
Линейная скорость — это отношение пройденного пути ко времени, в течение которого этот путь был пройден. Обозначается буквой v. Единица измерения — м/с.

l — длина траектории, вдоль которой двигалось тело за время t
Линейную скорость можно выразить через период. За один период тело делает один оборот, то есть проходить путь, равный длине окружности. Поэтому его скорость равна:
R — радиус окружности, по которой движется тело
Если линейную скорость можно выразить через период, то ее можно выразить и через частоту — величину, обратную периоду. Тогда формула примет вид:
Выразив частоту через количество оборотов и время, в течение которого тело совершало эти обороты, получим:
Угловая скорость
Угловая скорость — это отношение угла поворота тела ко времени, в течение которого тело совершало этот поворот. Обозначается буквой ω. Единица измерения — радиан в секунду (рад./с).

ϕ — угол поворота тела. t — время, в течение которого тело повернулось на угол ϕ
Радиан — угол, соответствующий дуге, длина которой равна ее радиусу. Полный угол равен 2π радиан.
За один полный оборот тело поворачивается на 2π радиан. Поэтому угловую скорость можно выразить через период:

Выражая угловую скорость через частоту, получим:
Выразив частоту через количество оборотов, формула угловой скорости примет вид:
Сравним две формулы:
Преобразуем формулу линейной скорости и получим:

Отсюда получаем взаимосвязь между линейной и угловой скоростями:
Полезные факты
- У вращающихся прижатых друг к другу цилиндров линейные скорости точек их поверхности равны: v1 = v2.
- У вращающихся шестерен линейные скорости точек их поверхности также равны: v1 = v2.
- Все точки вращающегося твердого тела имеют одинаковые периоды, частоты и угловые скорости, но разные линейные скорости. T1 = T2, ν1 = ν2, ω1 = ω2. Но v1 ≠ v2.
Пример №2. Период обращения Земли вокруг Солнца равен одному году. Радиус орбиты Земли равен 150 млн. км. Чему примерно равна скорость движения Земли по орбите? Ответ округлить до целых.
В году 365 суток, в одних сутках 24 часа, в 1 часе 60 минут, в одной минуте 60 секунд. Перемножив все эти числа между собой, получим период в секундах.

За каждую секунду Земля проходит расстояние, равное примерно 30 км.
Центростремительное ускорение
Центростремительное ускорение — ускорение с постоянным модулем, но меняющимся направлением. Поэтому оно вызывает изменение направления вектора скорости, но не изменяет его модуль. Центростремительное ускорение обозначается как aц.с.. Единица измерения — метры на секунду в квадрате (м/с 2 ). Центростремительное ускорение можно выразить через линейную и угловую скорости, период, частоту и количество оборотов/время:

Пример №3. Рассчитать центростремительное ускорение льва, спящего на экваторе, в системе отсчета, две оси которой лежат в плоскости экватора и направлены на неподвижные звезды, а начало координат совпадает с центром Земли.
Спящий лев сделает один полный оборот тогда, когда Земля сделает один оборот вокруг своей оси. Земля делает это за время, равное 1 сутки. Поэтому период обращения равен 1 суткам. Количество секунд в сутках: 1 сутки = 24•60•60 секунд = 86400 секунд = 86,4∙10 3 секунд.
Радиус Земли равен 6400 км. В метрах это будет 6,4∙10 6 . Теперь у нас есть все, что нужно для вычисления центростремительного ускорения. Подставляем данные в формулу:

Алгоритм решения
- Записать исходные данные.
- Записать формулу для определения искомой величины.
- Подставить известные данные в формулу и произвести вычисления.
Решение
Записываем исходные данные:
- Радиус окружности, по которой движется автомобиль: R = 100 м.
- Скорость автомобиля во время движения по окружности: v = 20 м/с.
Формула, определяющая зависимость центростремительного ускорения от скорости движения тела:
Подставляем известные данные в формулу и вычисляем:
pазбирался: Алиса Никитина | обсудить разбор | оценить
Точка движется по окружности радиусом R с частотой обращения ν. Как нужно изменить частоту обращения, чтобы при увеличении радиуса окружности в 4 раза центростремительное ускорение точки осталось прежним?
а) увеличить в 2 раза б) уменьшить в 2 раза в) увеличить в 4 раза г) уменьшить в 4 раза
Алгоритм решения
- Записать исходные данные.
- Определить, что нужно найти.
- Записать формулу зависимости центростремительного ускорения от частоты.
- Преобразовать формулу зависимости центростремительного ускорения от частоты для каждого из случаев.
- Приравнять правые части формул и найти искомую величину.
Решение
Запишем исходные данные:
Центростремительное ускорение определяется формулой:
Запишем формулы центростремительного ускорения для 1 и 2 случаев соответственно:
Так как центростремительное ускорение в 1 и 2 случае одинаково, приравняем правые части уравнений:
Произведем сокращения и получим:


Это значит, чтобы центростремительное ускорение осталось неизменным после увеличения радиуса окружности в 4 раза, частота должна уменьшиться вдвое. Верный ответ: «б».
pазбирался: Алиса Никитина | обсудить разбор | оценить
Прямолинейное движение и движение по окружности
Теория к заданию 1 из ЕГЭ по физике
Механическое движение. Относительность механического движения. Система отсчета
Под механическим движением понимают изменение с течением времени взаимного расположения тел или их частей в пространстве: например, движение небесных тел, колебания земной коры, воздушные и морские течения, движение летательных аппаратов и транспортных средств, машин и механизмов, деформации элементов конструкций и сооружений, движение жидкостей и газов и др.
Относительность механического движения
С относительностью механического движения мы знакомы с детства. Так, сидя в поезде и наблюдая за трогающимся с места поездом, стоявшим до этого на параллельном пути, мы часто не можем определить, какой из поездов на самом деле начал двигаться. И здесь сразу следует уточнить: двигаться относительно чего? Относительно Земли, конечно. Потому что относительно соседнего поезда мы начали двигаться независимо от того, какой из поездов начал свое движение относительно Земли.
Относительность механического движения заключается в относительности скоростей перемещения тел: скорости тел относительно разных систем отсчета будут различны (скорость человека, перемещающегося в поезде, пароходе, самолете, будет отличаться как по величине, так и по направлению, в зависимости от того, в какой системе отсчета эти скорости определяются: в системе отсчета, связанной с движущимся транспортным средством, или с неподвижной Землей).
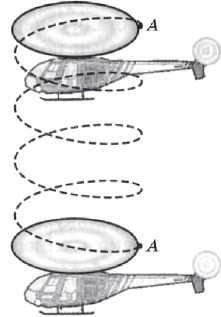
Различными будут и траектории движения тела в разных системах отсчета. Так, например, вертикально падающие на землю капли дождя оставят след в виде косых струй на окне вагона мчащегося поезда. Точно также любая точка на вращающемся пропеллере летящего самолета или спускающегося на землю вертолета описывает окружность относительно самолета и гораздо более сложную кривую — винтовую линию относительно Земли. Таким образом, при механическом движении относительной является также и траектория движения.
Путь, пройденный телом, также зависит от системы отсчета. Возвращаясь все к тому же пассажиру, сидящему в поезде, мы понимаем, что путь, проделанный им относительно поезда за время поездки, равен нулю (если он не передвигался по вагону) или, во всяком случае, намного меньше того пути, который он преодолел вместе с поездом относительно Земли. Таким образом, при механическом движении относительным является также и путь.
Осознание относительности механического движения (т. е. того, что движение тела можно рассматривать в разных системах отсчета) привело к переходу от геоцентрической системы мира Птолемея к гелиоцентрической системе Коперника. Птолемей, следуя наблюдаемому издревле движению Солнца и звезд на небосклоне, в центре Вселенной расположил неподвижную Землю с вращающимися вокруг нее остальными небесными телами. Коперник же считал, что Земля и другие планеты вращаются вокруг Солнца и одновременно вокруг своих осей.
Таким образом, изменение системы отсчета (Земля — в геоцентрической системе мира и Солнце — в гелиоцентрической) привело к гораздо более прогрессивной гелиоцентрической системе, позволяющей решить многие научные и прикладные задачи астрономии и изменить взгляды человечества на Вселенную.
Система координат $X, У, Z$, тело отсчета, с которым она связана, и прибор для измерения времени (часы) образуют систему отсчета, относительно которой рассматривается движение тела.
Телом отсчета называется тело, относительно которого рассматривается изменение положения других тел в пространстве.
Систему отсчета можно выбрать произвольно. При кинематических исследованиях все системы отсчета равноправны. В задачах динамики также можно использовать любые произвольно движущиеся системы отсчета, но удобнее всего инерциальные системы отсчета, так как в них характеристики движения имеют более простой вид.
Материальная точка
Материальная точка — объект пренебрежимо малых размеров, имеющий массу.
Понятие «материальная точка» вводится для описания (с помощью математических формул) механического движения тел. Делается это потому, что описывать движение точки проще, чем реального тела, частицы которого к тому же могут двигаться с разными скоростями (например, при вращении тела или деформациях).
Если реальное тело заменяют материальной точкой, то этой точке приписывают массу этого тела, но пренебрегают его размерами, а заодно пренебрегают различием характеристик движения его точек (скоростей, ускорений и т. д.), если таковое имеется. В каких случаях это можно делать?
Практически любое тело можно рассматривать как материальную точку, если расстояния, проходимые точками тела, очень велики по сравнению с его размерами.
Например, материальными точками считают Землю и другие планеты при изучении их движения вокруг Солнца. В данном случае различия в движении различных точек любой планеты, вызванные ее суточным вращением, не влияют на величины, описывающие годовое движение.
Следовательно, если в изучаемом движении тела можно пренебречь его вращением вокруг оси, такое тело можно представить как материальную точку.
Однако при решении задач, связанных с суточным вращением планет (например, при определении восхода Солнца в разных местах поверхности земного шара), считать планету материальной точкой бессмысленно, так как результат задачи зависит от размеров этой планеты и скорости движения точек ее поверхности.
Материальной точкой правомерно считать самолет, если требуется, например, определить среднюю скорость его движения на пути из Москвы в Новосибирск. Но при вычислении силы сопротивления воздуха, действующей на летящий самолет, считать его материальной точкой нельзя, поскольку сила сопротивления зависит от размеров и формы самолета.
Если тело движется поступательно, даже если его размеры сопоставимы с расстояниями, которые оно проходит, это тело можно рассматривать как материальную точку (поскольку все точки тела движутся одинаково).
В заключение можно сказать: тело, размерами которого в условиях рассматриваемой задачи можно пренебречь, можно считать материальной точкой.
Траектория
Траектория — это линия (или, как принято говорить, кривая), которую описывает тело при движении относительно выбранного тела отсчета.
Говорить о траектории имеет смысл лишь в том случае, когда тело можно представить в виде материальной точки.
Траектории могут иметь разную форму. О форме траектории иногда удается судить по-видимому следу, который оставляет движущееся тело, например, летящий самолет или проносящийся в ночном небе метеор.
Форма траектории зависит от выбора тела отсчета. Например, относительно Земли траектория движения Луны представляет собой окружность, относительно Солнца — линию более сложной формы.
При изучении механического движения в качестве тела отсчета, как правило, рассматривается Земля.
Способы задания положения точки и описание ее движения
Положение точки в пространстве задается двумя способами: 1) с помощью координат; 2) с помощью радиус-вектора.
Положение точки с помощью координат задается тремя проекциями точки $х, у, z$ на оси декартовой системы координат $ОХ, ОУ, OZ$, связанные с телом отсчета. Для этого из точки А необходимо опустить перпендикуляры на плоскости $YZ$ (координата $х$), $ХZ$ (координата $у$), $ХУ$ (координата $z$) соответственно. Записывается это так: $А(х, у, z)$. Для конкретного случая, $(х=6, у=10.2, z= 4.5$), точка $А$ обозначается $А(6; 10; 4.5)$.
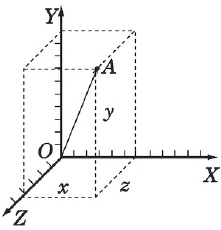
Наоборот, если заданы конкретные значения координат точки в данной системе координат, то для изображения самой точки необходимо отложить значения координат на соответствующие оси ($х$ на ось $ОХ$ и т. д.) и на этих трех взаимно перпендикулярных отрезках построить параллелепипед. Вершина его, противоположная началу координат $О$ и лежащая на диагонали параллелепипеда, и будет искомой точкой $А$.
Если точка движется в пределах некоторой плоскости, то через выбранные на теле отсчета точки достаточно провести две координатные оси: $ОХ$ и $ОУ$. Тогда положение точки на плоскости определяют двумя координатами $х$ и $у$.
Если точка движется вдоль прямой, достаточно задать одну координатную ось ОХ и направить ее вдоль линии движения.
Задание положения точки $А$ с помощью радиус-вектора осуществляется соединением точки $А$ с началом координат $О$. Направленный отрезок $ОА = r↖<→>$ называется радиус-вектором.
Радиус-вектор — это вектор, соединяющий начало отсчета с положением точки в произвольный момент времени.
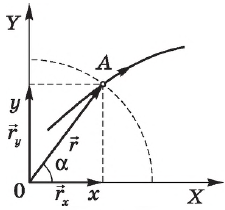
Точка задана радиус-вектором, если известны его длина (модуль) и направление в пространстве, т. е. значения его проекций $r_x, r_у, r_z$ на оси координат $ОХ, ОY, OZ$, либо углы между радиус-вектором и осями координат. Для случая движения на плоскости имеем:
Здесь $r=|r↖<→>|$ — модуль радиус-вектора $r↖<→>, r_x$ и $r_y$ — его проекции на оси координат, все три величины — скаляры; хжу — координаты точки А.
Последние уравнения демонстрируют связь между координатным и векторным способами задания положения точки.
Вектор $r↖<→>$ можно также разложить на составляющие по осям $Х$ и $Y$, т. е. представить в виде суммы двух векторов:
Таким образом, положение точки в пространстве задается либо ее координатами, либо радиус-вектором.
Способы описания движения точки
В соответствии со способами задания координат движение точки можно описать: 1) координатным способом; 2) векторным способом.
При координатном способе описания (или задания) движения изменение координат точки со временем записывается в виде функций всех трех ее координат от времени:
Уравнения называют кинематическими уравнениями движения точки, записанными в координатной форме. Зная кинематические уравнения движения и начальные условия (т. е. положение точки в начальный момент времени), можно определить положение точки в любой момент времени.
При векторном способе описания движения точки изменение ее положения со временем задается зависимостью радиус-вектора от времени:
Уравнение представляет собой уравнение движения точки, записанное в векторной форме. Если оно известно, то для любого момента времени можно рассчитать радиус-вектор точки, т. е. определить ее положение (как и в случае координатного способа). Таким образом, задание трех скалярных уравнений равносильно заданию одного векторного уравнения.
Для каждого случая движения вид уравнений будет вполне определенным. Если траекторией движения точки является прямая линия, движение называется прямолинейным, а если кривая — криволинейным.
Перемещение и путь
Перемещение в механике — это вектор, соединяющий положения движущейся точки в начале и в конце некоторого промежутка времени.
Понятие вектора перемещения вводится для решения задачи кинематики — определить положение тела (точки) в пространстве в данный момент времени, если известно его начальное положение.
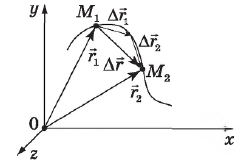
На рис. вектор $<М_1М_2>↖<->$ соединяет два положения движущейся точки — $М_1$ и $М_2$ в моменты времени $t_1$ и $t_2$ соответственно и, согласно определению, является вектором перемещения. Если точка $М_1$ задана радиус-вектором $r↖<→>_1$, а точка $М_2$ — радиус-вектором $r↖<→>_2$, то, как видно из рисунка, вектор перемещения равен разности этих двух векторов, т. е. изменению радиус-вектора за время $∆t=t_2-t_1$:
Сложение перемещений (например, на двух соседних участках траектории) $∆r↖<→>_1$ и $∆r↖<→>_2$ осуществляется по правилу сложения векторов:
Путь — это длина участка траектории, пройденного материальной точкой за данный промежуток времени. Модуль вектора перемещения в общем случае не равен длине пути, пройденного точкой за время $∆t$ (траектория может быть криволинейной, и, кроме того, точка может менять направление движения).
Модуль вектора перемещения равен пути только при прямолинейном движении в одном направлении. Если направление прямолинейного движения меняется, модуль вектора перемещения меньше пути.
При криволинейном движении модуль вектора перемещения также меньше пути, т. к. хорда всегда меньше длины дуги, которую она стягивает.
Скорость материальной точки
Скорость характеризует быстроту, с которой происходят любые изменения в окружающем нас мире (движение материи в пространстве и времени). Движение пешехода по тротуару, полет птицы, распространение звука, радиоволн или света в воздухе, вытекание воды из трубы, движение облаков, испарение воды, нагрев утюга — все эти явления характеризуются определенной скоростью.
При механическом движении тел скорость характеризует не только быстроту, но и направление движения, т. е. является векторной величиной.
Скоростью $υ↖<→>$ точки называется предел отношения перемещения $∆r↖<→>$ к промежутку времени $∆t$, в течение которого это перемещение произошло, при стремлении $∆t$ к нулю (т. е. производной $∆r↖<→>$ по $t$):
Составляющие вектора скорости по осям $X, Y, Z$ определяются аналогично:
Определенное таким образом понятие скорости называют также мгновенной скоростью. Это определение скорости справедливо для любых видов движения — от криволинейного неравномерного до прямолинейного равномерного. Когда говорят о скорости при неравномерном движении, под ней понимают именно мгновенную скорость. Из этого определения непосредственно вытекает векторный характер скорости, поскольку перемещение — векторная величина. Вектор мгновенной скорости $υ↖<→>$ всегда направлен по касательной к траектории движения. Он указывает направление, по которому происходило бы движение тела, если бы с момента времени $t$ на него прекратилось действие любых других тел.

Средняя скорость
Средняя скорость точки вводится для характеристики неравномерного движения (т.е. движения с переменной скоростью) и определяется двояко.
1. Средняя скорость точки $υ_<ср>$ равна отношению всего пройденного телом пути $∆s$ ко всему времени движения $∆t$:
При таком определении средняя скорость — скаляр, т. к. пройденный путь (расстояние) и время — величины скалярные.
Такой способ определения дает представление о средней скорости движения на участке траектории (средней путевой скорости).
2. Средняя скорость точки равна отношению перемещения точки к промежутку времени, в течение которого это перемещение произошло:
Средняя скорость перемещения — величина векторная.
Для неравномерного криволинейного движения такое определение средней скорости не всегда позволяет определить даже приблизительно реальные скорости на пути движения точки. Например, если точка двигалась по замкнутой траектории в течение некоторого времени, то перемещение ее равно нулю (но скорость явно отличалась от нуля). В этом случае лучше пользоваться первым определением средней скорости.
В любом случае следует различать эти два определения средней скорости и знать, о какой из них идет речь.
Закон сложения скоростей
Закон сложения скоростей устанавливает связь между значениями скорости материальной точки относительно различных систем отсчета, движущихся друг относительно друга. В нерелятивистской (классической) физике, когда рассматриваемые скорости малы по сравнению со скоростью света, справедлив закон сложения скоростей Галилея, который выражается формулой:
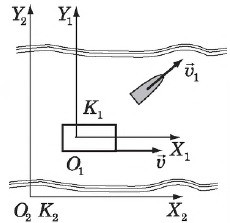
где $υ↖<→>_2$ и $υ↖<→>_1$ — скорости тела (точки) относительно двух инерциальных систем отсчета — неподвижной системы отсчета $K_2$ и системы отсчета $K_1$ движущейся со скоростью $υ↖<→>$ относительно $K_2$.
Формула может быть получена путем сложения векторов перемещений.
Для наглядности рассмотрим движение лодки со скоростью $υ↖<→>_1$ относительно реки (система отсчета $K_1$), воды которой движутся со скоростью $υ↖<→>$ относительно берега (система отсчета $K_2$).
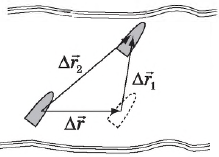
Векторы перемещений лодки относительно воды $∆r↖<→>_1$, реки относительно берега $∆r↖<→>$ и суммарный вектор перемещения лодки относительно берега $∆r↖<→>_2$ изображены на рис..
Поделив обе части уравнения на интервал времени $∆t$, получим:
В проекциях вектора скорости на оси координат уравнение имеет вид:
Проекции скоростей складываются алгебраически.
Относительная скорость
Из закона сложения скоростей следует, что если два тела движутся в одной и той же системе отсчета со скоростями $υ↖<→>_1$ и $υ↖<→>_2$, то скорость первого тела относительно второго $υ↖<→>_<12>$ равна разности скоростей этих тел:
Так, при движении тел в одном направлении (обгон) модуль относительной скорости равен разности скоростей, а при встречном движении — сумме скоростей.
Ускорение материальной точки
Ускорение — величина, характеризующая быстроту изменения скорости. Как правило, движение является неравномерным, т. е. происходит с переменной скоростью. На одних участках траектории тела могут иметь большую скорость, на других — меньшую. Например, поезд, отходящий от станции, со временем двигается все быстрее и быстрее. Подъезжая к станции, он, наоборот, замедляет свое движение.
Ускорение (или мгновенное ускорение) — векторная физическая величина, равная пределу отношения изменения скорости к промежутку времени, за который это изменение произошло, при стремлении $∆t$ к нулю, (т. е. производной $υ↖<→>$ по $t$):
Составляющие $a↖ <→>(а_х, а_у, а_z)$ равны соответственно:
Ускорение, как и изменение скорости, направлено в сторону вогнутости траектории и может быть разложено на две составляющие — тангенциальную — по касательной к траектории движения — и нормальную — перпендикулярно к траектории.
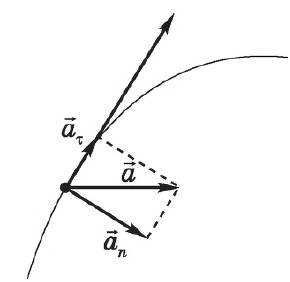
В соответствии с этим проекцию ускорения $а_х$ на касательную к траектории называют касательным, или тангенциальным ускорением, проекцию $a_n$ на нормаль — нормальным, или центростремительным ускорением.
Касательное ускорение определяет величину изменения численного значения скорости:
Нормальное, или центростремительное ускорение характеризует изменение направления скорости и определяется по формуле:
где R — радиус кривизны траектории в соответствующей ее точке.
Модуль ускорения определяется по формуле:
При прямолинейном движении полное ускорение $а$ равно тангенциальному $a=a_t$, т. к. центростремительное $a_n=0$.
Единицей ускорения в СИ является такое ускорение, при котором за каждую секунду скорость тела изменяется на 1 м/с. Эту единицу обозначают 1 м/с 2 и называют «метр на секунду в квадрате».
Равномерное прямолинейное движение
Движение точки называется равномерным, если за любые равные промежутки времени она проходит равные пути.
Например, если автомобиль за каждую четверть часа (15 мин) проходит 20 км, за каждые полчаса (30 мин) — 40 км, за каждый час (60 мин) — 80 км и т. д., то такое движение считается равномерным. При равномерном движении численная величина (модуль) скорости точки $υ$ — величина постоянная:
Равномерное движение может происходить как по криволинейной, так и по прямолинейной траектории.
Закон равномерного движения точки описывается уравнением:
где $s$ — расстояние, измеренное вдоль дуги траектории, от некоторой точки на траектории, принятой за начало отсчета; $t$ — время точки в пути; $s_0$ — значение $s$ в начальный момент времени $t=0$.
Путь, пройденный точкой за время $t$, определяется слагаемым $υt$.
Равномерное прямолинейное движение — это движение, при котором тело перемещается с постоянной по модулю и направлению скоростью:
Скорость равномерного прямолинейного движения — величина постоянная и может быть определена как отношение перемещения точки к промежутку времени, в течение которого это перемещение произошло:
Модуль этой скорости
по смыслу есть расстояние $s=|∆r↖<→>|$, пройденное точкой за время $∆t$.
Скорость тела при равномерном прямолинейном движении — это величина, равная отношению пути $s$ ко времени, за которое этот путь пройден:
Перемещение при прямолинейном равномерном движении (по оси X) можно рассчитать по формуле:
где $υ_x$ — проекция скорости на ось X. Отсюда закон прямолинейного равномерного движения имеет вид:
Если в начальный момент времени $x_0=0$, то
График зависимости скорости от времени — прямая, параллельная оси абсцисс, а пройденный путь — это площадь под этой прямой.
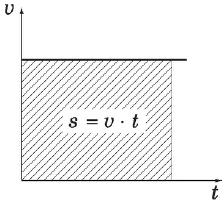
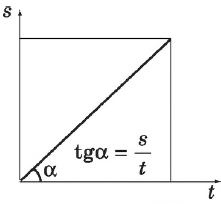
График зависимости пути от времени — прямая линия, угол наклона которой к оси времени $Ot$ тем больше, чем больше скорость равномерного движения. Тангенс этого угла равен скорости.
Равномерное движение по окружности.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: движение по окружности с постоянной по модулю скоростью, центростремительное ускорение.
Равномерное движение по окружности — это достаточно простой пример движения с вектором ускорения, зависящим от времени.
Пусть точка вращается по окружности радиуса . Скорость точки постоянна по модулю и равна . Скорость называется линейной скоростью точки.
Период обращения — это время одного полного оборота. Для периода имеем очевидную формулу:
Частота обращения — это величина, обратная периоду:
Частота показывает, сколько полных оборотов точка совершает за секунду. Измеряется частота в об/с (обороты в секунду).
Пусть, например, . Это означает, что за время точка совершает один полный
оборот. Частота при этом получается равна: об/с; за секунду точка совершает 10 полных оборотов.
Угловая скорость.
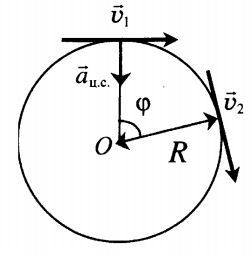
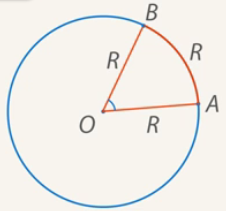
Рассмотрим равномерное вращение точки в декартовой системе координат. Поместим начало координат в центре окружности (рис. 1 ).
 |
| Рис. 1. Равномерное движение по окружности |
Пусть — начальное положение точки; иными словами, при точка имела координаты . Пусть за время точка повернулась на угол и заняла положение .
Отношение угла поворота ко времени называется угловой скоростью вращения точки:
Угол , как правило, измеряется в радианах, поэтому угловая скорость измеряется в рад/с. За время, равное периоду вращения, точка поворачивается на угол . Поэтому
Сопоставляя формулы (1) и (3) , получаем связь линейной и угловой скоростей:
Закон движения.
Найдём теперь зависимость координат вращающейся точки от времени. Видим из рис. 1 , что
Но из формулы (2) имеем: . Следовательно,
Формулы (5) являются решением основной задачи механики для равномерного движения точки по окружности.
Центростремительное ускорение.
Теперь нас интересует ускорение вращающейся точки. Его можно найти, дважды продифференцировав соотношения (5) :
С учётом формул (5) имеем:
Полученные формулы (6) можно записать в виде одного векторного равенства:
где — радиус-вектор вращающейся точки.
Мы видим, что вектор ускорения направлен противоположно радиус-вектору, т. е. к центру окружности (см. рис. 1 ). Поэтому ускорение точки, равномерно движущейся по окружности, называется центростремительным.
Кроме того, из формулы (7) мы получаем выражение для модуля центростремительного ускорения:
Выразим угловую скорость из (4)
и подставим в (8) . Получим ещё одну формулу для центростремительного ускорения:
источники:
http://examer.ru/ege_po_fizike/teoriya/pryamolinejnoe_dvizhenie_i_dvizhenie_po_okruzhnosti
http://ege-study.ru/ru/ege/materialy/fizika/ravnomernoe-dvizhenie-po-okruzhnosti/
Криволинейное движение — движение, траекторией которого является кривая линия. Вектор скорости тела, движущегося по кривой линии, направлен по касательной к траектории. Любой участок криволинейного движения можно представить в виде движения по дуге окружности или по участку ломаной.
Движение по окружности с постоянной по модулю скоростью — частный и самый простой случай криволинейного движения. Это движение с переменным ускорением, которое называется центростремительным.
Особенности движения по окружности с постоянной по модулю скоростью:
- Траектория движения тела есть окружность.
- Вектор скорости всегда направлен по касательной к окружности.
- Направление скорости постоянно меняется под действием центростремительного ускорения.
- Центростремительное ускорение направлено к центру окружности и не вызывает изменения модуля скорости.
Период, частота и количество оборотов
Пусть тело двигается по окружности беспрерывно. Когда оно сделает один оборот, пройдет некоторое время. Когда тело сделает еще один оборот, пройдет еще столько же времени. Это время не будет меняться, потому что тело движется с постоянной по модулю скоростью. Такое время называют периодом.
Период — время одного полного оборота. Обозначается буквой T. Единица измерения — секунды (с).
t — время, в течение которого тело совершило N оборотов
За один и тот же промежуток времени тело может проходить лишь часть окружности или совершать несколько единиц, десятков, сотен или более оборотов. Все зависит от длины окружности и модуля скорости.
Частота — количество оборотов, совершенных в единицу времени. Обозначается буквой ν («ню»). Единица измерения — Гц.
N — количество оборотов, совершенных телом за время t.
Период и частота — это обратные величины, определяемые формулами:
Количество оборотов выражается следующей формулой:
Пример №1. Шарик на нити вращается по окружности. За 10 секунд он совершил 20 оборотов. Найти период и частоту вращения шарика.
Линейная и угловая скорости
Линейная скорость
Определение и формулы
Линейная скорость — это отношение пройденного пути ко времени, в течение которого этот путь был пройден. Обозначается буквой v. Единица измерения — м/с.
l — длина траектории, вдоль которой двигалось тело за время t
Линейную скорость можно выразить через период. За один период тело делает один оборот, то есть проходить путь, равный длине окружности. Поэтому его скорость равна:
R — радиус окружности, по которой движется тело
Если линейную скорость можно выразить через период, то ее можно выразить и через частоту — величину, обратную периоду. Тогда формула примет вид:
![]()
Выразив частоту через количество оборотов и время, в течение которого тело совершало эти обороты, получим:
Угловая скорость
Определение и формулы
Угловая скорость — это отношение угла поворота тела ко времени, в течение которого тело совершало этот поворот. Обозначается буквой ω. Единица измерения — радиан в секунду (рад./с).
ϕ — угол поворота тела. t — время, в течение которого тело повернулось на угол ϕ
Полезные факты
Радиан — угол, соответствующий дуге, длина которой равна ее радиусу. Полный угол равен 2π радиан.
За один полный оборот тело поворачивается на 2π радиан. Поэтому угловую скорость можно выразить через период:
Выражая угловую скорость через частоту, получим:
![]()
Выразив частоту через количество оборотов, формула угловой скорости примет вид:
Сравним две формулы:
![]()
Преобразуем формулу линейной скорости и получим:
Отсюда получаем взаимосвязь между линейной и угловой скоростями:
Полезные факты
- У вращающихся прижатых друг к другу цилиндров линейные скорости точек их поверхности равны: v1 = v2.
- У вращающихся шестерен линейные скорости точек их поверхности также равны: v1 = v2.
- Все точки вращающегося твердого тела имеют одинаковые периоды, частоты и угловые скорости, но разные линейные скорости. T1 = T2, ν1 = ν2, ω1 = ω2. Но v1 ≠ v2.
Пример №2. Период обращения Земли вокруг Солнца равен одному году. Радиус орбиты Земли равен 150 млн. км. Чему примерно равна скорость движения Земли по орбите? Ответ округлить до целых.
В году 365 суток, в одних сутках 24 часа, в 1 часе 60 минут, в одной минуте 60 секунд. Перемножив все эти числа между собой, получим период в секундах.
За каждую секунду Земля проходит расстояние, равное примерно 30 км.
Центростремительное ускорение
Определение и формула
Центростремительное ускорение — ускорение с постоянным модулем, но меняющимся направлением. Поэтому оно вызывает изменение направления вектора скорости, но не изменяет его модуль. Центростремительное ускорение обозначается как aц.с.. Единица измерения — метры на секунду в квадрате (м/с2). Центростремительное ускорение можно выразить через линейную и угловую скорости, период, частоту и количество оборотов/время:
Пример №3. Рассчитать центростремительное ускорение льва, спящего на экваторе, в системе отсчета, две оси которой лежат в плоскости экватора и направлены на неподвижные звезды, а начало координат совпадает с центром Земли.
Спящий лев сделает один полный оборот тогда, когда Земля сделает один оборот вокруг своей оси. Земля делает это за время, равное 1 сутки. Поэтому период обращения равен 1 суткам. Количество секунд в сутках: 1 сутки = 24•60•60 секунд = 86400 секунд = 86,4∙103 секунд.
Радиус Земли равен 6400 км. В метрах это будет 6,4∙106. Теперь у нас есть все, что нужно для вычисления центростремительного ускорения. Подставляем данные в формулу:
Задание EF18273
Верхнюю точку моста радиусом 100 м автомобиль проходит со скоростью 20 м/с. Центростремительное ускорение автомобиля равно…
Алгоритм решения
- Записать исходные данные.
- Записать формулу для определения искомой величины.
- Подставить известные данные в формулу и произвести вычисления.
Решение
Записываем исходные данные:
- Радиус окружности, по которой движется автомобиль: R = 100 м.
- Скорость автомобиля во время движения по окружности: v = 20 м/с.
Формула, определяющая зависимость центростремительного ускорения от скорости движения тела:
Подставляем известные данные в формулу и вычисляем:
Ответ: 4
pазбирался: Алиса Никитина | обсудить разбор | оценить
Задание EF17763
Точка движется по окружности радиусом R с частотой обращения ν. Как нужно изменить частоту обращения, чтобы при увеличении радиуса окружности в 4 раза центростремительное ускорение точки осталось прежним?
а) увеличить в 2 раза
б) уменьшить в 2 раза
в) увеличить в 4 раза
г) уменьшить в 4 раза
Алгоритм решения
- Записать исходные данные.
- Определить, что нужно найти.
- Записать формулу зависимости центростремительного ускорения от частоты.
- Преобразовать формулу зависимости центростремительного ускорения от частоты для каждого из случаев.
- Приравнять правые части формул и найти искомую величину.
Решение
Запишем исходные данные:
- Радиус окружности R1 = R.
- Радиус окружности R2 = 4R.
- Центростремительное ускорение: aц.с. = a1 = a2.
Найти нужно ν2.
Центростремительное ускорение определяется формулой:
![]()
Запишем формулы центростремительного ускорения для 1 и 2 случаев соответственно:
Так как центростремительное ускорение в 1 и 2 случае одинаково, приравняем правые части уравнений:
Произведем сокращения и получим:
![]()
Или:
Отсюда:
Это значит, чтобы центростремительное ускорение осталось неизменным после увеличения радиуса окружности в 4 раза, частота должна уменьшиться вдвое. Верный ответ: «б».
Ответ: б
pазбирался: Алиса Никитина | обсудить разбор | оценить
Алиса Никитина | Просмотров: 20.1k
Теория по физике на тему «Криволинейное движение»
- 06.11.2016
Теория по физике на тему «Криволинейное движение»:
- криволинейное движение
- радиус кривизны
- касательное ускорение
- центростремительное ускорение
- модуль полного ускорения
Смотреть в PDF:
Или прямо сейчас: cкачать в pdf файле.
Сохранить ссылку:
Комментарии (0)
Добавить комментарий
Добавить комментарий
Комментарии без регистрации. Несодержательные сообщения удаляются.
Имя (обязательное)
E-Mail
Подписаться на уведомления о новых комментариях
Отправить
Механическое движение. Относительность механического движения. Система отсчета
Под механическим движением понимают изменение с течением времени взаимного расположения тел или их частей в пространстве: например, движение небесных тел, колебания земной коры, воздушные и морские течения, движение летательных аппаратов и транспортных средств, машин и механизмов, деформации элементов конструкций и сооружений, движение жидкостей и газов и др.
Относительность механического движения
С относительностью механического движения мы знакомы с детства. Так, сидя в поезде и наблюдая за трогающимся с места поездом, стоявшим до этого на параллельном пути, мы часто не можем определить, какой из поездов на самом деле начал двигаться. И здесь сразу следует уточнить: двигаться относительно чего? Относительно Земли, конечно. Потому что относительно соседнего поезда мы начали двигаться независимо от того, какой из поездов начал свое движение относительно Земли.
Относительность механического движения заключается в относительности скоростей перемещения тел: скорости тел относительно разных систем отсчета будут различны (скорость человека, перемещающегося в поезде, пароходе, самолете, будет отличаться как по величине, так и по направлению, в зависимости от того, в какой системе отсчета эти скорости определяются: в системе отсчета, связанной с движущимся транспортным средством, или с неподвижной Землей).
Различными будут и траектории движения тела в разных системах отсчета. Так, например, вертикально падающие на землю капли дождя оставят след в виде косых струй на окне вагона мчащегося поезда. Точно также любая точка на вращающемся пропеллере летящего самолета или спускающегося на землю вертолета описывает окружность относительно самолета и гораздо более сложную кривую — винтовую линию относительно Земли. Таким образом, при механическом движении относительной является также и траектория движения.
Путь, пройденный телом, также зависит от системы отсчета. Возвращаясь все к тому же пассажиру, сидящему в поезде, мы понимаем, что путь, проделанный им относительно поезда за время поездки, равен нулю (если он не передвигался по вагону) или, во всяком случае, намного меньше того пути, который он преодолел вместе с поездом относительно Земли. Таким образом, при механическом движении относительным является также и путь.
Осознание относительности механического движения (т. е. того, что движение тела можно рассматривать в разных системах отсчета) привело к переходу от геоцентрической системы мира Птолемея к гелиоцентрической системе Коперника. Птолемей, следуя наблюдаемому издревле движению Солнца и звезд на небосклоне, в центре Вселенной расположил неподвижную Землю с вращающимися вокруг нее остальными небесными телами. Коперник же считал, что Земля и другие планеты вращаются вокруг Солнца и одновременно вокруг своих осей.
Таким образом, изменение системы отсчета (Земля — в геоцентрической системе мира и Солнце — в гелиоцентрической) привело к гораздо более прогрессивной гелиоцентрической системе, позволяющей решить многие научные и прикладные задачи астрономии и изменить взгляды человечества на Вселенную.
Система координат $X, У, Z$, тело отсчета, с которым она связана, и прибор для измерения времени (часы) образуют систему отсчета, относительно которой рассматривается движение тела.
Телом отсчета называется тело, относительно которого рассматривается изменение положения других тел в пространстве.
Систему отсчета можно выбрать произвольно. При кинематических исследованиях все системы отсчета равноправны. В задачах динамики также можно использовать любые произвольно движущиеся системы отсчета, но удобнее всего инерциальные системы отсчета, так как в них характеристики движения имеют более простой вид.
Материальная точка
Материальная точка — объект пренебрежимо малых размеров, имеющий массу.
Понятие «материальная точка» вводится для описания (с помощью математических формул) механического движения тел. Делается это потому, что описывать движение точки проще, чем реального тела, частицы которого к тому же могут двигаться с разными скоростями (например, при вращении тела или деформациях).
Если реальное тело заменяют материальной точкой, то этой точке приписывают массу этого тела, но пренебрегают его размерами, а заодно пренебрегают различием характеристик движения его точек (скоростей, ускорений и т. д.), если таковое имеется. В каких случаях это можно делать?
Практически любое тело можно рассматривать как материальную точку, если расстояния, проходимые точками тела, очень велики по сравнению с его размерами.
Например, материальными точками считают Землю и другие планеты при изучении их движения вокруг Солнца. В данном случае различия в движении различных точек любой планеты, вызванные ее суточным вращением, не влияют на величины, описывающие годовое движение.
Следовательно, если в изучаемом движении тела можно пренебречь его вращением вокруг оси, такое тело можно представить как материальную точку.
Однако при решении задач, связанных с суточным вращением планет (например, при определении восхода Солнца в разных местах поверхности земного шара), считать планету материальной точкой бессмысленно, так как результат задачи зависит от размеров этой планеты и скорости движения точек ее поверхности.
Материальной точкой правомерно считать самолет, если требуется, например, определить среднюю скорость его движения на пути из Москвы в Новосибирск. Но при вычислении силы сопротивления воздуха, действующей на летящий самолет, считать его материальной точкой нельзя, поскольку сила сопротивления зависит от размеров и формы самолета.
Если тело движется поступательно, даже если его размеры сопоставимы с расстояниями, которые оно проходит, это тело можно рассматривать как материальную точку (поскольку все точки тела движутся одинаково).
В заключение можно сказать: тело, размерами которого в условиях рассматриваемой задачи можно пренебречь, можно считать материальной точкой.
Траектория
Траектория — это линия (или, как принято говорить, кривая), которую описывает тело при движении относительно выбранного тела отсчета.
Говорить о траектории имеет смысл лишь в том случае, когда тело можно представить в виде материальной точки.
Траектории могут иметь разную форму. О форме траектории иногда удается судить по-видимому следу, который оставляет движущееся тело, например, летящий самолет или проносящийся в ночном небе метеор.
Форма траектории зависит от выбора тела отсчета. Например, относительно Земли траектория движения Луны представляет собой окружность, относительно Солнца — линию более сложной формы.
При изучении механического движения в качестве тела отсчета, как правило, рассматривается Земля.
Способы задания положения точки и описание ее движения
Положение точки в пространстве задается двумя способами: 1) с помощью координат; 2) с помощью радиус-вектора.
Положение точки с помощью координат задается тремя проекциями точки $х, у, z$ на оси декартовой системы координат $ОХ, ОУ, OZ$, связанные с телом отсчета. Для этого из точки А необходимо опустить перпендикуляры на плоскости $YZ$ (координата $х$), $ХZ$ (координата $у$), $ХУ$ (координата $z$) соответственно. Записывается это так: $А(х, у, z)$. Для конкретного случая, $(х=6, у=10.2, z= 4.5$), точка $А$ обозначается $А(6; 10; 4.5)$.
Наоборот, если заданы конкретные значения координат точки в данной системе координат, то для изображения самой точки необходимо отложить значения координат на соответствующие оси ($х$ на ось $ОХ$ и т. д.) и на этих трех взаимно перпендикулярных отрезках построить параллелепипед. Вершина его, противоположная началу координат $О$ и лежащая на диагонали параллелепипеда, и будет искомой точкой $А$.
Если точка движется в пределах некоторой плоскости, то через выбранные на теле отсчета точки достаточно провести две координатные оси: $ОХ$ и $ОУ$. Тогда положение точки на плоскости определяют двумя координатами $х$ и $у$.
Если точка движется вдоль прямой, достаточно задать одну координатную ось ОХ и направить ее вдоль линии движения.
Задание положения точки $А$ с помощью радиус-вектора осуществляется соединением точки $А$ с началом координат $О$. Направленный отрезок $ОА = r↖{→}$ называется радиус-вектором.
Радиус-вектор — это вектор, соединяющий начало отсчета с положением точки в произвольный момент времени.
Точка задана радиус-вектором, если известны его длина (модуль) и направление в пространстве, т. е. значения его проекций $r_x, r_у, r_z$ на оси координат $ОХ, ОY, OZ$, либо углы между радиус-вектором и осями координат. Для случая движения на плоскости имеем:
$x=r_x=rcosα,$
$y=r_y=rsinα.$
Здесь $r=|r↖{→}|$ — модуль радиус-вектора $r↖{→}, r_x$ и $r_y$ — его проекции на оси координат, все три величины — скаляры; хжу — координаты точки А.
Последние уравнения демонстрируют связь между координатным и векторным способами задания положения точки.
Вектор $r↖{→}$ можно также разложить на составляющие по осям $Х$ и $Y$, т. е. представить в виде суммы двух векторов:
$r↖{→}=r↖{→}_x+r↖{→}_y$
Таким образом, положение точки в пространстве задается либо ее координатами, либо радиус-вектором.
Способы описания движения точки
В соответствии со способами задания координат движение точки можно описать: 1) координатным способом; 2) векторным способом.
При координатном способе описания (или задания) движения изменение координат точки со временем записывается в виде функций всех трех ее координат от времени:
$x = x(t),$
$y = y(t),$
$z = z(t).$
Уравнения называют кинематическими уравнениями движения точки, записанными в координатной форме. Зная кинематические уравнения движения и начальные условия (т. е. положение точки в начальный момент времени), можно определить положение точки в любой момент времени.
При векторном способе описания движения точки изменение ее положения со временем задается зависимостью радиус-вектора от времени:
$r↖{→}=r↖{→}(t)$
Уравнение представляет собой уравнение движения точки, записанное в векторной форме. Если оно известно, то для любого момента времени можно рассчитать радиус-вектор точки, т. е. определить ее положение (как и в случае координатного способа). Таким образом, задание трех скалярных уравнений равносильно заданию одного векторного уравнения.
Для каждого случая движения вид уравнений будет вполне определенным. Если траекторией движения точки является прямая линия, движение называется прямолинейным, а если кривая — криволинейным.
Перемещение и путь
Перемещение в механике — это вектор, соединяющий положения движущейся точки в начале и в конце некоторого промежутка времени.
Понятие вектора перемещения вводится для решения задачи кинематики — определить положение тела (точки) в пространстве в данный момент времени, если известно его начальное положение.
На рис. вектор ${М_1М_2}↖{-}$ соединяет два положения движущейся точки — $М_1$ и $М_2$ в моменты времени $t_1$ и $t_2$ соответственно и, согласно определению, является вектором перемещения. Если точка $М_1$ задана радиус-вектором $r↖{→}_1$, а точка $М_2$ — радиус-вектором $r↖{→}_2$, то, как видно из рисунка, вектор перемещения равен разности этих двух векторов, т. е. изменению радиус-вектора за время $∆t=t_2-t_1$:
$∆r↖{→}=r↖{→}_2-r↖{→}_1$.
Сложение перемещений (например, на двух соседних участках траектории) $∆r↖{→}_1$ и $∆r↖{→}_2$ осуществляется по правилу сложения векторов:
$∆r=∆r↖{→}_2+∆r↖{→}_1$
Путь — это длина участка траектории, пройденного материальной точкой за данный промежуток времени. Модуль вектора перемещения в общем случае не равен длине пути, пройденного точкой за время $∆t$ (траектория может быть криволинейной, и, кроме того, точка может менять направление движения).
Модуль вектора перемещения равен пути только при прямолинейном движении в одном направлении. Если направление прямолинейного движения меняется, модуль вектора перемещения меньше пути.
При криволинейном движении модуль вектора перемещения также меньше пути, т. к. хорда всегда меньше длины дуги, которую она стягивает.
Скорость материальной точки
Скорость характеризует быстроту, с которой происходят любые изменения в окружающем нас мире (движение материи в пространстве и времени). Движение пешехода по тротуару, полет птицы, распространение звука, радиоволн или света в воздухе, вытекание воды из трубы, движение облаков, испарение воды, нагрев утюга — все эти явления характеризуются определенной скоростью.
При механическом движении тел скорость характеризует не только быстроту, но и направление движения, т. е. является векторной величиной.
Скоростью $υ↖{→}$ точки называется предел отношения перемещения $∆r↖{→}$ к промежутку времени $∆t$, в течение которого это перемещение произошло, при стремлении $∆t$ к нулю (т. е. производной $∆r↖{→}$ по $t$):
$υ↖{→}={lim}↙{∆t→0}{∆r↖{→}}/{∆t}=r↖{→}_1’$
Составляющие вектора скорости по осям $X, Y, Z$ определяются аналогично:
$υ↖{→}_x={lim}↙{∆t→0}{∆x}/{∆t}=x’; υ_y=y’; υ_z=z’$
Определенное таким образом понятие скорости называют также мгновенной скоростью. Это определение скорости справедливо для любых видов движения — от криволинейного неравномерного до прямолинейного равномерного. Когда говорят о скорости при неравномерном движении, под ней понимают именно мгновенную скорость. Из этого определения непосредственно вытекает векторный характер скорости, поскольку перемещение — векторная величина. Вектор мгновенной скорости $υ↖{→}$ всегда направлен по касательной к траектории движения. Он указывает направление, по которому происходило бы движение тела, если бы с момента времени $t$ на него прекратилось действие любых других тел.
Средняя скорость
Средняя скорость точки вводится для характеристики неравномерного движения (т.е. движения с переменной скоростью) и определяется двояко.
1. Средняя скорость точки $υ_{ср}$ равна отношению всего пройденного телом пути $∆s$ ко всему времени движения $∆t$:
$υ↖{→}_{ср}={∆s}/{∆t}$
При таком определении средняя скорость — скаляр, т. к. пройденный путь (расстояние) и время — величины скалярные.
Такой способ определения дает представление о средней скорости движения на участке траектории (средней путевой скорости).
2. Средняя скорость точки равна отношению перемещения точки к промежутку времени, в течение которого это перемещение произошло:
$υ↖{→}_{ср}={∆r↖{→}}/{∆t}$
Средняя скорость перемещения — величина векторная.
Для неравномерного криволинейного движения такое определение средней скорости не всегда позволяет определить даже приблизительно реальные скорости на пути движения точки. Например, если точка двигалась по замкнутой траектории в течение некоторого времени, то перемещение ее равно нулю (но скорость явно отличалась от нуля). В этом случае лучше пользоваться первым определением средней скорости.
В любом случае следует различать эти два определения средней скорости и знать, о какой из них идет речь.
Закон сложения скоростей
Закон сложения скоростей устанавливает связь между значениями скорости материальной точки относительно различных систем отсчета, движущихся друг относительно друга. В нерелятивистской (классической) физике, когда рассматриваемые скорости малы по сравнению со скоростью света, справедлив закон сложения скоростей Галилея, который выражается формулой:
$υ↖{→}_2=υ↖{→}_1+υ↖{→}$
где $υ↖{→}_2$ и $υ↖{→}_1$ — скорости тела (точки) относительно двух инерциальных систем отсчета — неподвижной системы отсчета $K_2$ и системы отсчета $K_1$ движущейся со скоростью $υ↖{→}$ относительно $K_2$.
Формула может быть получена путем сложения векторов перемещений.
Для наглядности рассмотрим движение лодки со скоростью $υ↖{→}_1$ относительно реки (система отсчета $K_1$), воды которой движутся со скоростью $υ↖{→}$ относительно берега (система отсчета $K_2$).
Векторы перемещений лодки относительно воды $∆r↖{→}_1$, реки относительно берега $∆r↖{→}$ и суммарный вектор перемещения лодки относительно берега $∆r↖{→}_2$ изображены на рис..
Математически:
$∆r↖{→}_2=∆r↖{→}_1+∆r↖{→}$
Поделив обе части уравнения на интервал времени $∆t$, получим:
${∆r↖{→}_2}/{∆t}={∆r↖{→}_1}/{∆t}+{∆r↖{→}}/{∆t}$
В проекциях вектора скорости на оси координат уравнение имеет вид:
$υ_{2x}=υ_{1x}+υ_x,$
$υ_{2y}=υ_{1y}+υ_y.$
Проекции скоростей складываются алгебраически.
Относительная скорость
Из закона сложения скоростей следует, что если два тела движутся в одной и той же системе отсчета со скоростями $υ↖{→}_1$ и $υ↖{→}_2$, то скорость первого тела относительно второго $υ↖{→}_{12}$ равна разности скоростей этих тел:
$υ↖{→}_{12}=υ↖{→}_1-υ↖{→}_2$
Так, при движении тел в одном направлении (обгон) модуль относительной скорости равен разности скоростей, а при встречном движении — сумме скоростей.
Ускорение материальной точки
Ускорение — величина, характеризующая быстроту изменения скорости. Как правило, движение является неравномерным, т. е. происходит с переменной скоростью. На одних участках траектории тела могут иметь большую скорость, на других — меньшую. Например, поезд, отходящий от станции, со временем двигается все быстрее и быстрее. Подъезжая к станции, он, наоборот, замедляет свое движение.
Ускорение (или мгновенное ускорение) — векторная физическая величина, равная пределу отношения изменения скорости к промежутку времени, за который это изменение произошло, при стремлении $∆t$ к нулю, (т. е. производной $υ↖{→}$ по $t$):
$a↖{→}=lim↙{∆t→0}{∆υ↖{→}}/{∆t}=υ↖{→}_t’$
Составляющие $a↖{→} (а_х, а_у, а_z)$ равны соответственно:
$a_x=υ_x’;a_y=υ_y’;a_z=υ_z’$
Ускорение, как и изменение скорости, направлено в сторону вогнутости траектории и может быть разложено на две составляющие — тангенциальную — по касательной к траектории движения — и нормальную — перпендикулярно к траектории.
В соответствии с этим проекцию ускорения $а_х$ на касательную к траектории называют касательным, или тангенциальным ускорением, проекцию $a_n$ на нормаль — нормальным, или центростремительным ускорением.
Касательное ускорение определяет величину изменения численного значения скорости:
$a_t=lim↙{∆t→0}{∆υ}/{∆t}$
Нормальное, или центростремительное ускорение характеризует изменение направления скорости и определяется по формуле:
$a_n={v^2}/{R}$
где R — радиус кривизны траектории в соответствующей ее точке.
Модуль ускорения определяется по формуле:
$a=√{a_t^2+a_n^2}$
При прямолинейном движении полное ускорение $а$ равно тангенциальному $a=a_t$, т. к. центростремительное $a_n=0$.
Единицей ускорения в СИ является такое ускорение, при котором за каждую секунду скорость тела изменяется на 1 м/с. Эту единицу обозначают 1 м/с2 и называют «метр на секунду в квадрате».
Равномерное прямолинейное движение
Движение точки называется равномерным, если за любые равные промежутки времени она проходит равные пути.
Например, если автомобиль за каждую четверть часа (15 мин) проходит 20 км, за каждые полчаса (30 мин) — 40 км, за каждый час (60 мин) — 80 км и т. д., то такое движение считается равномерным. При равномерном движении численная величина (модуль) скорости точки $υ$ — величина постоянная:
$υ=|υ↖{→}|=const$
Равномерное движение может происходить как по криволинейной, так и по прямолинейной траектории.
Закон равномерного движения точки описывается уравнением:
$s=s_0+υt$
где $s$ — расстояние, измеренное вдоль дуги траектории, от некоторой точки на траектории, принятой за начало отсчета; $t$ — время точки в пути; $s_0$ — значение $s$ в начальный момент времени $t=0$.
Путь, пройденный точкой за время $t$, определяется слагаемым $υt$.
Равномерное прямолинейное движение — это движение, при котором тело перемещается с постоянной по модулю и направлению скоростью:
$υ↖{→}=const$
Скорость равномерного прямолинейного движения — величина постоянная и может быть определена как отношение перемещения точки к промежутку времени, в течение которого это перемещение произошло:
$υ↖{→}={∆r↖{→}}/{∆t}$
Модуль этой скорости
$υ={|∆r↖{→}|}/{∆t}$
по смыслу есть расстояние $s=|∆r↖{→}|$, пройденное точкой за время $∆t$.
Скорость тела при равномерном прямолинейном движении — это величина, равная отношению пути $s$ ко времени, за которое этот путь пройден:
$υ={s}/{t}$
Перемещение при прямолинейном равномерном движении (по оси X) можно рассчитать по формуле:
$∆x=υ_xt$
где $υ_x$ — проекция скорости на ось X. Отсюда закон прямолинейного равномерного движения имеет вид:
$x=x_0+υ_xt$
Если в начальный момент времени $x_0=0$, то
$x=υ_xt$
График зависимости скорости от времени — прямая, параллельная оси абсцисс, а пройденный путь — это площадь под этой прямой.
График зависимости пути от времени — прямая линия, угол наклона которой к оси времени $Ot$ тем больше, чем больше скорость равномерного движения. Тангенс этого угла равен скорости.
Секрет задач на движение по окружности: тот, кто обгоняет, проезжает на 1 круг больше, если это первый обгон. И на n кругов больше, если обогнал другого в n-ный раз.
 Из одной точки круговой трассы, длина которой равна 8 км, одновременно в одном направлении стартовали два автомобиля. Скорость первого автомобиля равна 114 км/ч, и через 20 минут после старта он опережал второй автомобиль на один круг. Найдите скорость второго автомобиля. Ответ дайте в км/ч.
Из одной точки круговой трассы, длина которой равна 8 км, одновременно в одном направлении стартовали два автомобиля. Скорость первого автомобиля равна 114 км/ч, и через 20 минут после старта он опережал второй автомобиль на один круг. Найдите скорость второго автомобиля. Ответ дайте в км/ч.
Автомобили стартовали одновременно, и первый автомобиль через 20 минут после старта опережал второй автомобиль на один круг. Значит, за эти 20 минут, то есть за  часа он проехал на 1 круг больше – то есть на 8 км больше.
часа он проехал на 1 круг больше – то есть на 8 км больше.
За час первый автомобиль проедет на  км больше второго. Скорость второго автомобиля на 24 км/ч меньше, чем у первого, и равна 114 — 24 = 90 км/ч.
км больше второго. Скорость второго автомобиля на 24 км/ч меньше, чем у первого, и равна 114 — 24 = 90 км/ч.
Ответ: 90.
 Из пункта
Из пункта  круговой трассы выехал велосипедист, а через
круговой трассы выехал велосипедист, а через  минут следом за ним отправился мотоциклист. Через
минут следом за ним отправился мотоциклист. Через  минут после отправления он догнал велосипедиста в первый раз, а еще через минут после этого догнал его во второй раз. Найдите скорость мотоциклиста, если длина трассы равна км. Ответ дайте в км/ч.
минут после отправления он догнал велосипедиста в первый раз, а еще через минут после этого догнал его во второй раз. Найдите скорость мотоциклиста, если длина трассы равна км. Ответ дайте в км/ч.
Во-первых, переведем минуты в часы, поскольку скорость надо найти в км/ч. Скорости участников обозначим за  и
и  . В первый раз мотоциклист обогнал велосипедиста через минут, то есть через
. В первый раз мотоциклист обогнал велосипедиста через минут, то есть через  часа после старта. До этого момента велосипедист был в пути
часа после старта. До этого момента велосипедист был в пути  минут, то есть
минут, то есть  часа.
часа.
Запишем эти данные в таблицу:
 |
|
 |
|
| велосипедист | |
|
 |
| мотоциклист | |
|
 |
Оба проехали одинаковые расстояния, то есть  .
.
Затем мотоциклист второй раз обогнал велосипедиста. Произошло это через минут, то есть через  часа после первого обгона.
часа после первого обгона.
Нарисуем вторую таблицу.
|
 |
|
|
| велосипедист | |
|
 |
| мотоциклист | |
|
 |
А какие же расстояния они проехали? Мотоциклист обогнал велосипедиста. Значит, он проехал на один круг больше. Это и есть секрет данной задачи. Один круг — это длина трассы, она равна км. Получим второе уравнение:

Решим получившуюся систему.


Получим, что  . В ответ запишем скорость мотоциклиста.
. В ответ запишем скорость мотоциклиста.
Ответ:  .
.
 Часы со стрелками показывают
Часы со стрелками показывают  часов
часов  минут. Через сколько минут минутная стрелка в четвертый раз поравняется с часовой?
минут. Через сколько минут минутная стрелка в четвертый раз поравняется с часовой?
Это, пожалуй, самая сложная задача из вариантов ЕГЭ. Конечно, есть простое решение — взять часы со стрелками и убедиться, что в четвертый раз стрелки поравняются через  часа, ровно в
часа, ровно в  .
.
А как быть, если у вас электронные часы и вы не можете решить задачу экспериментально?
За один час минутная стрелка проходит один круг, а часовая  часть круга. Пусть их скорости равны
часть круга. Пусть их скорости равны  (круг в час) и (круга в час). Старт — в
(круг в час) и (круга в час). Старт — в  . Найдем время, за которое минутная стрелка в первый раз догонит часовую.
. Найдем время, за которое минутная стрелка в первый раз догонит часовую.
Минутная стрелка пройдет на круга больше, поэтому уравнение будет таким:

Решив его, получим, что  часа. Итак, в первый раз стрелки поравняются через часа. Пусть во второй раз они поравняются через время
часа. Итак, в первый раз стрелки поравняются через часа. Пусть во второй раз они поравняются через время  . Минутная стрелка пройдет расстояние
. Минутная стрелка пройдет расстояние  , а часовая
, а часовая  , причем минутная стрелка пройдет на один круг больше. Запишем уравнение:
, причем минутная стрелка пройдет на один круг больше. Запишем уравнение:

Решив его, получим, что  часа. Итак, через
часа. Итак, через  часа стрелки поравняются во второй раз, еще через часа — в третий, и еще через часа — в четвертый.
часа стрелки поравняются во второй раз, еще через часа — в третий, и еще через часа — в четвертый.
Значит, если старт был в , то в четвертый раз стрелки поравняются через  часа.
часа.
Ответ полностью согласуется с «экспериментальным» решением! 
На экзамене по математике вам может также встретиться задача о нахождении средней скорости. Запомним, что средняя скорость не равна среднему арифметическому скоростей. Она находится по специальной формуле:
 ,
,
где  — средняя скорость,
— средняя скорость,  — общий путь,
— общий путь,  — общее время.
— общее время.
Если участков пути было два, то

А сейчас покажем вам один из секретов решения текстовых задач. Что делать, если у вас получился в уравнении пятизначный дискриминант? Да, это реальная ситуация! Это может встретиться в варианте ЕГЭ.
 Два гонщика участвуют в гонках. Им предстоит проехать 60 кругов по кольцевой трассе протяжённостью 3 км. Оба гонщика стартовали одновременно, а на финиш первый пришёл раньше второго на 10 минут. Чему равнялась средняя скорость второго гонщика, если известно, что первый гонщик в первый раз обогнал второго на круг через 15 минут? Ответ дайте в км/ч.
Два гонщика участвуют в гонках. Им предстоит проехать 60 кругов по кольцевой трассе протяжённостью 3 км. Оба гонщика стартовали одновременно, а на финиш первый пришёл раньше второго на 10 минут. Чему равнялась средняя скорость второго гонщика, если известно, что первый гонщик в первый раз обогнал второго на круг через 15 минут? Ответ дайте в км/ч.
Первый гонщик через 15 минут после старта обогнал второго на 1 круг. Значит, за 15 минут он проехал на 1 круг, то есть на 3 километра больше. За час он проедет на  километров больше. Его скорость на 12 км/ч больше, чем скорость второго.
километров больше. Его скорость на 12 км/ч больше, чем скорость второго.
Как всегда, составляем таблицу и уравнение. 10 минут переведем в часы. Это  часа.
часа.

Честно преобразовав это уравнение к квадратному, получим:

Пятизначный дискриминант, вот повезло! Но есть и другой способ решения, и он намного проще.
Посмотрим еще раз на наше уравнение:

Заметим, что 180 делится на 12. Сделаем замену: 
![]()
![]()
![]()
Это уравнение легко привести к квадратному и решить.
Целый положительный корень этого уравнения:  Тогда
Тогда 
Ответ: 108
Мы решили текстовую задачу с помощью замены переменной. Этот прием в математике используется везде: в решении задач, уравнений и неравенств, в задачах с параметрами и интегрировании. Общее правило: можете сделать замену переменной – сделайте.
Спасибо за то, что пользуйтесь нашими публикациями.
Информация на странице «Задачи ЕГЭ на движение по окружности» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к ЕГЭ и ОГЭ.
Чтобы успешно сдать необходимые и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими материалами из данного раздела.
Публикация обновлена:
08.03.2023