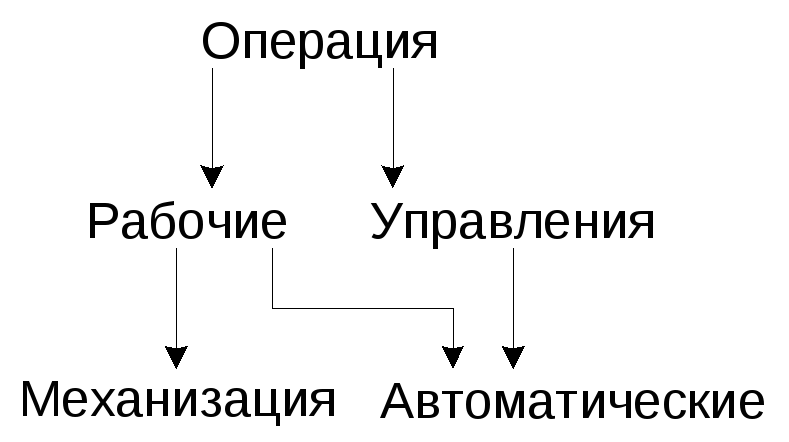
Операция:
-
Рабочая
операция
(необходимые для выполнения процесса.
Пример:
снятие стружки при обработке детали
на станке) -
Операция управления(обеспечивают
в нужные моменты времени начало, порядок
следования и прекращение отдельных
операций). Совокупность управляющих
операций образует процесс управления
Механизация
–
замена труда человека в рабочих операциях
Автоматизация
–замена труда человека в
операциях управления
Автоматические
устройства –технические
устройства, выполняющие операции
управления.
Объект
управления – совокупность
технических средств выполняющих данный
процесс
Система
управления – совокупность
средств управления
Автоматическая
система –система, в которой
все рабочие и управляющие операции
выполняют автоматические устройства
Автоматизированная
(частично автоматическая) система –
система
в которой автоматизировании только
часть операций, другая часть операций
остается за людьми
Объект:
-
Статический
(безынерционный) –
-
Динамический
– объект
обладает инерцией, зависимость
дифференциальная, интегральная,
разностная
2. Основные принципы регулирования. Регулирование по разомкнутому циклу. Регулирование по возмущению. Регулирование по отклонению (по ошибке). Обратная связь.
В основе построения системы
автоматического управления лежат
некоторые общие фундаментальные принципы
управления, определяющие, каким образом
осуществляется увязка алгоритмов
функционирования и управления с
фактическим функционированием или
причинами, вызывающими отклонение
функционирования от заданного. В
настоящее время в технике известны
и используют три фундаментальных
принципа: разомкнутого
управления, компенсации
и обратной связи.
1. Принцип разомкнутого управления
используется на вспомогат. операц.
(закрыт — открыт)
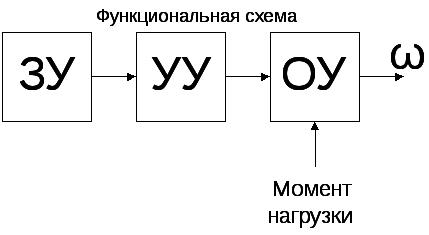
Работу систем автоматического управления
можно описывать с помощью функциональных
схем, которые показывают из каких
элементов состоит система и как эти
элементы связаны между собой.
Под функциональным элементом понимается
конструктивно обособленная часть
системы выполняющая определенные
функции: измерения, усиления, сравнения,
преобразования.
Недостаток: невысокая точность
системы управления – отсутствие
информации о действительном значении
управляемой величины.
2. Принцип управления по возмущению.
И дея
дея
принципа: необходимо каким-либо
образом измерить возмущающее воздействие
и в зависимости от результатов измерения
оказать на объект управления управляющее
воздействие, устанавливающее вредное
влияние измеренного возмущения.
Недостатки принципа:
— инвариантность управляемой величины
обеспечивается лишь по отношению к тому
возмущению, которое измеряется.
— инвариантность управляемой величины
достигается лишь при строгом соответствии
параметров элементов системы расчетным
образом.
3. Принцип обратной связи:
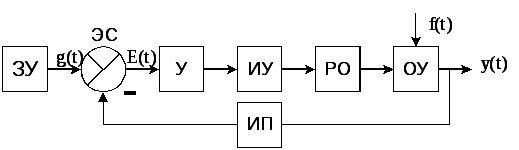
ОУ – объект управления; ИП – измерительный
преобразователь
ЗУ – задающее устройство; ЭС – элемент
сравнения
У – усилитель устройства; ИУ –
исполнительное устройство
РО – регулирующий орган
y(t) –
управляемая, регулируемая величина.;g(t) – задающее
воздействие
E(t) – ошибка
регулирования;f(t)
– внешнее воздействие
Соседние файлы в папке экзамен
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
-
Файлы
- Академическая и специальная литература
- Автоматизация
Теория автоматического управления (ТАУ)
Теория автоматического управления (ТАУ) — это дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Материал из Википедии — свободной энциклопедии.
- Список файлов
- Последние файлы
- RSS
Учебно-методические материалы
- Отфильтровано по типу
- Шпаргалки и ответы
- отменить фильтр
- doc
- image
- txt
- Сортировать файлы
- по дате добавления
- по заголовку
- по популярности
- В1
- О7
- С1
- Т2
- У1
- Ш27
- Э2
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Ответы на вопросы (вопросы выложены раннее) для устного госэкзамена по билетам. Содержит около 50 специализированных ответов по АСУ, 15 ответов по охране труда и 15 ответов по экономике предприятия. Все ответы отсортированы, т. е. вопрос-ответ.
Список затронутых тем по предметам Теория Автоматического Управления (ТАУ) и Автоматизированные Системы Управления (АСУ):…
- №2
- 6,06 МБ
- дата добавления неизвестна
- описание отредактировано 25.05.2009 19:59
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
301 кафедра МАИ, 2016, препод — Михайлин Д.А., 34 с.
Датчики первичной информации ЛА. Статическая характеристика.
Исполнительный привод ЛА.
Уравнение продольного движения ЛА. Основные передаточные функции ЛА в продольном канале. Запись в форме Коши.
Уравнения бокового движения ЛА. Основные передаточные функции ЛА.
Структурная схема оптимальной САУ ЛА.
Критерии и показатели…
- №3
- 10,22 МБ
- добавлен 05.04.2016 14:32
- описание отредактировано 05.04.2016 23:05
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Вопросы к экзамену по ТАУ для студентов з/о 3 курса; з/у 2 курса Основные определения. Понятие о передаточной функции. Классификация САУ. Математическое описание идеальных звеньев. Математическое описание реальных звеньев 1-го порядка. Математическое описание реального звена 2-го порядка. Передаточные характеристики при различных соединениях звеньев (последовательное и…
- №4
- 3,41 МБ
- добавлен 17.09.2012 06:54
- описание отредактировано 17.09.2012 13:24
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Кубанский Государственный Технологический Университет. Факультет КТАС. 4 курс. Специальность 230101 (Вычислительные машины, комплексы, системы и сети).
Элементарная схема САУ
Классификафия САУ
Замкнутая и разомкнутая системы. Принципы управления. Комбинированное управление.
Математическое описание САУ.
Переходные процессы в САУ. Виды переходных процессов.
Переходные…
- №5
- 713,30 КБ
- добавлен 23.01.2012 07:58
- описание отредактировано 23.01.2012 13:18
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
ГОСЭКЗАМЕН по специальности 220301.65 МГТУ им Г.И.Носова, Магнитогорск, 2013 Основные понятия ТАУ: объект управления, регулируемая величина, внешнее возмущение, управление. Функциональная схема системы автоматического управления. Основные принципы управления. Классификация систем управления. Основные разновидности сигналов и воздействий в САУ: регулярные сигналы (единичная…
- №6
- 2,05 МБ
- добавлен 25.06.2013 18:16
- описание отредактировано 26.06.2013 01:05
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Теория управления. Предмет изучения и задачи.
Классификация систем управления.
Уравнения динамики системы автоматического управления. Передаточная функция.
Виды соединений.
Структурные преобразования.
Типовые входные воздействия и реакции на них.
АФЧХ, АЧХ и ФЧХ. Комплексная плоскость для построения годографа.
характеристик.
ЛАЧХ и ЛФЧХ. Система координат для построения…
- №7
- 593,76 КБ
- дата добавления неизвестна
- описание отредактировано 22.10.2009 02:21
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Ивановский государственный энергетический университет, Россия, Таламанов С.А.
Специальность 220201, курс 3, семестр 6
Дисциплина — Теория автоматического управления (ч. 2)
Вопросы:
Автоматический регулятор
Функциональная классификация типов АСР
Ошибка управления
Критерий качества управления
Разновидности ЛДС по признаку устойчивости
Принцип аргумента
Частота среза…
- №8
- 72,84 КБ
- добавлен 03.10.2011 04:37
- описание отредактировано 04.10.2011 02:14
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Словарь составленный мною, имеющий в алфавитном порядке слова-термины в алфавитном порядке как по ТАУ, так и по сопутствующим предметам для студента, изучающего системы автоматического управления летательными аппаратами и комплексами
- №9
- 64,35 КБ
- дата добавления неизвестна
- описание отредактировано 28.07.2019 07:37
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Павлодар: ПГУ, 2014.-37 с. 180 вопросов с 8 вариантами ответов на каждый, 3 правильных ответа приводятся первыми. Предназначены для тестирования бакалавров специальности 5В070200 Автоматизация и управление, могут использоваться в процессе изучения ТАУ для других специальностей.
Требование иметь в тестах 3 правильных ответа и 5 неправильных, естественно, сузило базу для вопросов и…
- №10
- 344,58 КБ
- добавлен 10.01.2014 14:13
- описание отредактировано 10.01.2014 16:10
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
200 вопросов, разбитых по темам учебной программы и по уровню сложности. Правильный ответ из пяти возможных (A,B,C,D,E) везде указан первым (А). Предназначены для тестирования бакалавров специальности 050702 «Автоматизация и управление», могут быть использованы и для других специальностей при изучении ТАУ. Полезны преподавателям, начинающим применять тестирование
- №11
- 97,89 КБ
- дата добавления неизвестна
- описание отредактировано 06.01.2010 14:37
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
МАИ, экзамен, 2015, 18 с. Введение. Критерии устойчивости. Понятие устойчивости системы. Условие устойчивости САУ. Алгебраические критерии устойчивости. Критерий Рауса. Критерий Гурвица. Частотные критерии устойчивости. Принцип аргумента. Критерий устойчивости Михайлова. Критерий устойчивости Найквиста. Запас устойчивости систем. Понятие структурной устойчивости. Понятие запаса…
- №12
- 239,62 КБ
- добавлен 27.06.2016 08:59
- описание отредактировано 27.06.2016 22:13
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Составлены по курсу лекций Пузанова В.П. «Теория линейных систем автоматического управления и регулирования». — МГТУ им. Н.Э. Баумана. — 114с.
Содержание:
Характеристики систем автоматического управления и их звеньев
Логарифмические частотные характеристики разомкнутых систем
Критерии устойчивости
Точность систем автоматического управления. Коэффициенты ошибок
Виды…
- №13
- 1,36 МБ
- дата добавления неизвестна
- описание отредактировано 06.07.2011 09:30
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Основные понятия и определения теории автоматического управления Общие понятия Воздействия и сигналы Элементы и звенья АСУ Принципы построения АСУ и их классификация Классификация элементов автоматических систем Теория линейных систем управления Общие сведения о линейных системах Устойчивость линейных АСУ Линейные непрерывные АСУ Линейные дискретные АСУ Линейные АСУ при…
- №14
- 2,57 МБ
- дата добавления неизвестна
- описание отредактировано 22.01.2010 04:45
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Основные понятия теории управления. Общая структура БМС
Причинные представления в БМС. Свойства причинных связей
Основные понятия теории систем. Свойства и элементы систем
Описание систем в теории управления
Описание живых систем как части БМС, компартментные модели
Структурный анализ БМС, сигнальные графы
Устойчивость линейных систем
Динамические системы, фазовая…
- №15
- 815,69 КБ
- дата добавления неизвестна
- описание отредактировано 27.06.2010 11:12
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Відповіді на такі питання:
1. Послідовні цифрові порти вводу-виводу.
2. Паралельні цифрові порти вводу-виводу.
3. Стандартні рівні напруги цифрових портів.
4. Стандартні швидкості цифрових портів.
5. Завадостійкість при передачі інформації.
6. Плати ЦВВ.
7. RS-485.
8. RS-422.
9. Для чого служать цифрові порти вводу-виводу.
10. Які ви знаєте порти вводу-виводу.
11. Для…
- №16
- 59,82 КБ
- добавлен 10.10.2014 20:28
- описание отредактировано 11.10.2014 14:22
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Відповіді на такі запитання: 1. Визначення давачів, застосування. 2. Класифікація давачів. 3. Статичні характеристики давачів. 4. Динамічні характеристики давачів. 5. Дискретні давачі та давачі плавної дії. 6. Похибки спричиненні давачами. 7. Складені давачі (з подвійним перетворенням). 8. Будова, принцип дії, характеристики і схема включення термопари. 9. Будова, принцип дії,…
- №17
- 108,61 КБ
- добавлен 10.10.2014 20:31
- описание отредактировано 11.10.2014 14:22
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Відповіді на такі запитання: 1. Які види АЦП ви знаєте? 2. Принцип дії АЦП? 3. Призначення, можливості й область застосування модуля АЦП? 4. Основні загальні характеристики модуля АЦП? 5. Основні технічні характеристики модуля АЦП? 6. Основні конструктивні характеристики модуля АЦП? 7. Тип і призначення контактів роз’ємів модуля АЦП? 8. Опишіть роботу з модулем АЦП? 9. Опишіть…
- №18
- 486,57 КБ
- добавлен 10.10.2014 20:32
- описание отредактировано 11.10.2014 14:23
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
ИГЭУ Специальность 220201 Курс 3, семестр 5 Характеристики типовых звеньев Динамические характеристики типовых звеньев Уравнение движения Передаточная функция системы Переходная характеристика системы Импульсная переходная характеристика системы Комплексная частотная характеристика (КЧХ) системы Таблица преобразований Лапласа Ответы на контрольные вопросы Объект управления…
- №19
- 485,92 КБ
- добавлен 03.10.2011 03:59
- описание отредактировано 04.10.2011 02:14
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
УГАТУ, 3 курс, 6 семестр. Предмет: ТАУ, Преподаватель: Лянцев О. Д. Архив содержит фотографии с решение основных задач по ТАУ на экзамен.
- №21
- 11,79 МБ
- дата добавления неизвестна
- описание отредактировано 31.05.2010 20:16
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Выходные данные неизвестны. — 3 с.
Линейные непрерывные системы АУ.
Принцип обратной связи.
Принцип разомкнутого управления.
Принцип компенсации (регулирование по возмущению).
Классификация САУ.
Система программного регулирования.
Следящая система.
Статическое и астатическое регулирование.
САР непрерывно импульсного и релейного действия.
Частотные характеристики….
- №22
- 247,74 КБ
- добавлен 31.03.2013 07:01
- описание отредактировано 31.03.2013 13:28
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Основные принципы управления
Классификация систем управления
Динамическое и типовое звено, передаточная функция звена или системы
Основные характеристики звеньев и систем в временной области
- №23
- 26,83 МБ
- добавлен 22.01.2012 16:58
- описание отредактировано 22.01.2012 21:01
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Відповіді на екзамен з ТАУ.
Питання І з Теми
1.1. Опис САР у часовій області, або з Теми
1.2. Опис САР у просторі зображень, або з Теми
3.1. Математичні моделі детермінованих технічних та біологічних об’єктів.
Питання II з Теми
1.3. Стійкість САР, або з Теми
2.1. Методи синтезу лінійних детермінованих систем
- №24
- 2,82 МБ
- добавлен 12.01.2013 03:10
- описание отредактировано 13.01.2013 21:20
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
КФ УГАТУ, АП, 5 семестр. Список вопросов: Функциональная схема пилотажного комплекса ЛА. Функциональная схема САУ силовой установки ЛА. Функциональная схема интегральной САУ ЛА и СУ. Классификация силовых установок летательных аппаратов. Принципы работы ГТД. Классификация САУ силовых установок. Уравнения движения ТРД. Матричная форма записи уравнений ГТД. Свойства ТРД как…
- №25
- 6,62 МБ
- дата добавления неизвестна
- описание отредактировано 15.01.2011 17:19
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Экзамен. Уфа, УГАТУ, 2012 год. Преподаватель — Сильнова С.В. Структура САУ. Функциональное назначение элементов. Принципы управления Классификация систем автоматического управления. Задачи теории автоматического управления. Понятие передаточной функции. Свойства передаточной функции. Типовые динамические звенья (ТДЗ). Передаточные функции типовых динамических звеньев. Понятие…
- №26
- 581,33 КБ
- добавлен 02.10.2012 19:46
- описание отредактировано 03.10.2012 14:08
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Линейные САУ Обратная связь Регулирование Переходная функция Критерии устойчивости Динамические сдвиги Построение частотных характеристик Проектирование и синтез САР Инвариантное воздействие Дискретные типы САР и основные элементы импульсов САР Линейные непрерывные системы АУ. Классификация САУ. 4 страницы. КПИ.
- №27
- 247,58 КБ
- дата добавления неизвестна
- описание отредактировано 21.12.2009 00:25
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
КФ УГАТУ, Муфаззалов, 3 семестр, АП.
Список вопросов:
Основные понятия и определения ТАУ. Задачи управления. Принципы регулирования.
Управление по разомкнутому и замкнутому принципу. Системы комбинированного управления.
Системы стабилизации, системы программного управления, следящие системы.
Дифференциальные уравнения САУ. Уравнения статики. Линеаризация уравнений….
- №28
- 1,64 МБ
- дата добавления неизвестна
- описание отредактировано 25.01.2010 19:40
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Понятие ТАУ как науки.
Основные понятия и определения теории управления.
Задачи теории автоматического управления.
Принципы построения САУ.
Классификация систем автоматического управления.
Понятие о звене САУ и его статической характеристике.
Типовые входные воздействия. Переходная и импульсная характеристики.
Методы описания динамических свойств звеньев и систем: модели…
- №29
- 212,50 КБ
- дата добавления неизвестна
- описание отредактировано 02.04.2007 17:21
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Писались с конспекта, отредактированные и сверстанные — всё готово к печати.
Автоматическая система управления.
АФЧХ(Годограф Найквиста).
Последовательное, параллельное и псевдопараллельное соединения звеньев.
Типовые звенья.
Входные воздействия.
Передаточная характеристика замкнутой системы по заданному контуру.
Коррекция САР.
П-, И-, ПИД-регуляторы.
Точность, надежность…
- №30
- 293,42 КБ
- дата добавления неизвестна
- описание отредактировано 14.10.2008 11:43
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Описаны временные и частотные характеристики основных позиционных, интегрирующих и диференцирующих звеньев, с графиками и основными формулами.
- №31
- 134,47 КБ
- дата добавления неизвестна
- описание отредактировано 12.01.2009 13:08
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Основные понятия и определения.
Принципы управления.
Классификация систем управления.
Математическое описание. Уравнения статики и динамики. Линеаризация.
Математическое описание. Преобразование Лапласа. Передаточная функция.
Математическое описание. Частотные характеристики.(АФЧХ, ЛАХ и ЛФХ).
Математическое описание. Временные характеристики.
Элементарные типовые звенья….
- №32
- 978,78 КБ
- дата добавления неизвестна
- описание отредактировано 13.02.2009 13:23
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Теория управления. Предмет изучения и задачи. Классификация систем управления. Уравнения динамики системы автоматического управления. Передаточная функция. Виды соединений. Структурные преобразования. Типовые входные воздействия и реакции на них. АФЧХ, АЧХ и ФЧХ. Комплексная плоскость для построения годографа. характеристик. ЛАЧХ и ЛФЧХ. Система координат для построения…
- №33
- 11,15 МБ
- дата добавления неизвестна
- описание отредактировано 31.01.2010 16:48
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Шпоры к экзамену по ОТУ (основы теории управления) для спец ИВТ САПР. Преподаватель Закиева Е. Ш. Шпоры были написаны собственноручно в MS Word начиная с 1 вопроса по 29. На экзамене билеты номеруются по первому вопросу из опросника. В шпору добавлены решения задач (первых 3 типов)
- №34
- 713,60 КБ
- дата добавления неизвестна
- описание отредактировано 23.03.2019 01:54
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Шпоры для специальности АТП. 62 вопроса. Цели и задачи дисциплин ТАУ. Историческая справка. Основные понятия ТАУ. Классификация САУ. Виды схем, использующихся в ТАУ. Характеристики звеньев САР. Эквивалентные характеристики. Преобразование Лапласа. АЧХ, ФЧХ, АФЧХ, ВЧХ, МЧХ, ЛФХ. Типовые звенья САР. Точность САР. Устойчивость САР. Критерий устойчивости. Показатели качества…
- №35
- 641,97 КБ
- дата добавления неизвестна
- описание отредактировано 09.01.2004 17:05
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Шпоры по лекциям Мунасыпова. 42 вопроса. Звенья САУ, их характеристики, критерии устойчивости, анализ точности и оценка качества, синтез САУ, нелиненйные САУ и многое другое. Вариант для печати, 8 шпор на лист A4, 10 листов. Содержание достаточное для сдачи на отлично. Опробованы.
- №36
- 2,09 МБ
- дата добавления неизвестна
- описание отредактировано 07.01.2004 13:23
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
МГТУ им. Н.Э. Баумана Содержание: Основные понятия и определения ТАУ Математические модели САУ Дифференциальные ур-я САУ Передаточные функции САУ Структурные схемы САУ и их преобразование Характеристики САУ и их звеньев Частотные характеристики САУ и их звеньев Временные и частотные характеристики интегратора Временные и частотные хар-ки апериодического звена Временные и…
- №37
- 796,01 КБ
- дата добавления неизвестна
- описание отредактировано 06.07.2011 09:48
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Экзамен Вопросы: Назначение, состав и структура САУ. Сигналы в системах автоматического управления. Основные принципы управления и требования к САУ. Прямое и обратное преобразование Лапласа, основные свойства, примеры преобразований Дифференциальная и операторная формы уравнений САУ. Передаточная функция динамической системы. Свойства передаточной функции. Частотные…
- №38
- 11,62 МБ
- дата добавления неизвестна
- описание отредактировано 21.01.2023 22:40
- Раздел: Автоматизация → Теория автоматического управления (ТАУ)
Экзамен. СамГТУ, Климашов Б.М., 2009 г.
Основные понятие теории автоматического регулирования.
Статический режим работы САУ. Основное уравнение статики.
Динамический режим работы САУ. Передаточная функция.
Апериодическое звено первого и второго порядка.
Колебательное звено.
Дифференцирующее звено.
Интегрирующее звено.
Звено с запаздыванием. Безынерционное звено.
Условия…
- №39
- 54,08 МБ
- добавлен 15.06.2014 04:27
- описание отредактировано 15.06.2014 22:31
В этом разделе нет файлов.
- В1
- О7
- С1
- Т2
- У1
- Ш27
- Э2
1.Последовательность открытия критериев устойчивости:
2.Результирующая ЛАЧХ замкнутой системы при встречно-параллельном соединении звеньев проводится:
3. Звенья, имеющие положительный сдвиг по фазе:
4.Соответствие типа входного воздействия 1 и графика реакции 2 в устойчивой системе:
5.Входные переменные объекта управления:
6.Частотные оценки качества разомкнутой системы:
7.Совокупность обратных связей по всем переменным в одном корректирующем устройстве:
8.Продолжите формулировку: Чем меньше…
9.Последовательность настройки многоконтурной системы:
10.Постоянные времени двигателя постоянного тока:
Выберите один или несколько ответов: Тм Тя Тд Кя
11.Частотные критерии устойчивости:
12.Рабочие операции: 13.Соответствие структурной схемы фундаментальному принципу управления:
14.Схема подчиненного регулирования имеет регуляторы:
15.Сформулируйте логическое утверждение для изодромного звена:
16.Система автоматического управления, имеющая нулевую ошибку в статике:
17.Прямые показатели качества монотонного процесса:
18.Входной сигнал для получения весовой характеристики системы:
19.К неустойчивой системе относятся:
20.Время достижения кривой переходного процесса установившегося значения первый раз:
21.Обратная связь, работающая только в динамическом режиме (переходном процессе):
22.Алгебраические критерии устойчивости:
23.Соответствие звена и его ЛАЧХ:
24.Система автоматического управления, имеющая нулевую ошибку в статике: 25.Входной сигнал для получения частотных характеристик системы:
26.Частота среза замкнутого контура с последовательным корректирующим устройством при полученных частотных характеристиках равна:
27.Показатели качества апериодического процесса:
28.Рекомендация для предварительного выбора параметров регулятора в САУ с инерционными звеньями называется правилом … оптимума
29.Последовательность обеспечения заданных показателей качества переходных процессов замкнутой системы:
30.Редуктор можно идентифицировать звеном:
31.Входной сигнал для получения переходной характеристики системы:
32.Преимущества замкнутой системы автоматического управления: ь
33.Продолжите формулировку следствия из критерия устойчивости Найквиста: «Чем меньше…»
34.Операции управления:
35.Рекомендация для предварительного выбора параметров регулятора в САУ с интегрирующим и инерционными звеньями называется правилом … оптимума
36.Последовательность получения частотных характеристик системы:
37.Соответствие элемента структурной схемы и его условного обозначения:
38.Правило оценки устойчивости без решения характеристического уравнения системы:
39.Соответствие звена и его передаточной функции:
40.Соответствие типа переходного процесса в устойчивой системе и его графика:
41.Граничное значение фазы на частоте среза устойчивой системы (в градусах):
42.Экспонента — это … тип (вид кривой) переходного процесса.
43.Последовательность построения ЛАЧХ встречно-параллельного соединения звеньев замкнутой системы:
44.ЛАЧХ и ЛФЧХ изодромного звена:
45.Основными элементами структурной схемы являются:
46.Последовательность построения ЛАЧХ согласно-параллельного соединения звеньев замкнутой системы:
47.Соответствие наклона ЛАЧХ и асимптоты ЛФЧХ:
48.Порядок синтеза последовательного корректирующего устройства в виде изодромного звена:
49.Последовательность настройки схемы подчиненного регулирования электропривода постоянного тока:
50.Масштаб, используемый для построения частотных характеристик (ЛАЧХ и ЛФЧХ).
51.Фундаментальные принципы управления:
52.Автор алгебраического критерия устойчивости с вычислениями всех специальных определителей n-го порядка:
53.Типовые входные воздействия: a. импульсное b. ступенчатое c. треугольное d. гармоническое e. хаотическое
54.Регулируемые переменные объекта управления: a. управляющие воздействия b. выходные координаты c. входные переменные d. возмущения e. внутренние координаты
55.Кривая, используемая в критерии устойчивости Михайлова —
56.Определитель Гурвица второго порядка для системы с характеристическим оператором равен:
57.Соответствие типа переходного процесса и запаса по фазе: колебательный апериодический монотонный
58.Соответствие звена и его уравнения:
59.Если Кя=10, то скорость двигателя при номинальном моменте нагрузки равна (в о.е.):
60.Тип звена регулятора при нулевой ошибке управления:
Раздел 1
1)
Система – это совокупность
элементов и устройств, находящихся в отношениях и связях между собой и образующих
определенную целостность, единство;
2)
Система автоматического управления
– это совокупность объекта управления и управляющего устройства, взаимодействие
которых приводит к выполнению поставленной цели ;
3)
Свойства системы – это качества
позволяющие описывать систему и выделять ее среди других систем;
4)
Чем характеризуются свойства
системы —совокупностью параметров одни, из которых могут иметь количественную
меру, другие выражаться лишь качественно
5)
Свойства системы проявляются в
результате взаимодействия — с внешней средой;
6)
Объект управления это — производственный,
технологический процесс или технический объект, участвующий в определенном взаимодействии
с другими объектами или процессами, нуждающийся в специальном организованном
управляющем воздействии;
7)
Управляемая величина – это параметр
производственного, технологического процесса или технического объекта, который
необходимо поддерживать постоянным или изменять по определенному закону

Управление – это процесс
организации такого целенаправленного воздействия на объект, в результате которого
объект переходит в требуемое (целевое) состояние;
9)
Устройство управления – это комплекс
устройств, присоединенных к объекту управления и обеспечивающих автоматическое
поддержание заданного значения его управляемой величины или автоматическое
изменению последней по определенному закону;
10)
Из каких элементов состоит САУ? объекта
управления, измерительного устройства, задающего устройства, сравнивающего
устройства, усилителя и исполнительного механизма;
11)
Для чего в САУ предназначено
задающее устройство? для установления необходимого значения управляемой
величины и преобразования управляемой величины в величину удобную для
преобразования или использования;
12)
Для чего в САУ предназначено
измерительное устройство? для измерения действительного значения управляемой
величины;
13)
Для чего в САУ предназначено
сравнивающее устройство? для сравнения управляемой величины с её заданным
значением и выявления отклонения управляемой величины от заданного значения;
14)
Для чего в САУ предназначен
исполнительный механизм? для воздействия на управляемый орган объекта
управления;
15)
Для чего в САУ предназначен
корректирующий элемент? для изменения свойств автоматических систем в нужном
направлении;
16)
Обратная связь — это? воздействие
выхода системы управления на ее вход;
17)
От чего будет зависеть алгоритм
управления выходной координатой объекта управления?
верны все выше перечисленные ответы;
18)
При каких условиях оправдано
управление по заданному воздействию (принцип разомкнутого управления)? высокая
стабильность параметров САУ, стабильность внешней среды и невысокие требования
к точности;
19)
Какие недостатки имеет принцип
управления по возмущению? в случае преобладания неконтролируемых возмущений
этот способ не дает требуемой точности;
20)
Какие недостатки имеет принцип
управления по отклонению? затруднено управление быстродействующими
системами управления, особенно это характерно для инерционных систем;
21)
Какие недостатки имеет принцип
разомкнутого управления? высокая стабильность параметром САУ, стабильность
внешней среды и невысокие требования к точности;
22)
Какие существуют принципы
управления? по заданному воздействию (разомкнутого управления), по возмущению,
по отклонению (образной связи), комбинированного управления ;
23)
Как делятся САУ в зависимости от
вида и способа формирования задающего сигнала?
стабилизации, программного
управления, следящие;
24)
В чем отличительная особенность
систем стабилизации? задающее устройство в таких системах вырабатывает
управляющее воздействие определенной величины y0 = const, с которой
сравнивается управляемая величина при работе системы;
25)
В чем отличительная особенность
систем программного управления? предназначены для изменения управляемой
величины по известному закону в функции времени или какой либо другой величины,
алгоритм функционирования таких систем заранее известен, т.е. есть задатчик
программы, вырабатывающий программу y0(t);
26)
Примерами систем стабилизации являются
стабилизаторы напряжения, температуры, скорости, углового перемещения;
27)
Примерами программных систем являются
стабилизаторы напряжения, температуры, скорости, углового перемещения;
28)
Примерами следящих систем являются
робот с дистанционным управлением, управляемая ракета;
29)
В чем отличительная особенность
следящих систем управления? алгоритм функционирования таких систем заранее
известен, т.е. есть задатчик программы, вырабатывающий программу y0(t),
предназначены для изменения управляемой величины по известному закону в функции
времени или какой либо другой величины;
30)
Как делятся САУ в зависимости от
способа математического описания?
стационарные и нестационарные;
Вопрос № 3164
В холодильнике переключатель, устанавливающий степень охлаждения в морозильной камере, является…
элементом сравнения
чувствительным элементом
исполнительным элементом
задающим элементом
Вопрос № 5956
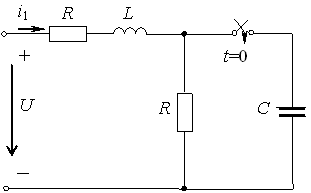
При различных действительных корнях характеристического уравнения свободная составляющая тока  запишется в виде…
запишется в виде…
Вопрос № 11832
Если сигнал на выходе элемента представляет собой разность задающего и выходного сигналов системы, то его называют…
дифференцирующим элементом
чувствительным элементом
преобразователем
элементом сравнения
Вопрос № 12661
Регулятор, рассчитанный методом желаемых частотных характеристик, реализуется в виде…
набора корректирующих фильтров в локальных контурах управления
параллельного корректирующего устройства
взвешенной суммы переменных состояния
последовательного корректирующего устройства
Вопрос № 23802
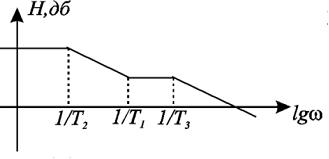
Коэффициент чувствительности некоторой характеристики Н системы, например, перерегулирования, к параметру q этой системы определяется выражением…
Вопрос № 23994
Коэффициент статической ошибки зависит от коэффициента передачи в…
системе, содержащей интегратор в прямой цепи
системе с астатическим объектом управления
системе с астатизмом по входному воздействию
статической системе
Вопрос № 24054
Коэффициент статической ошибки замкнутой системы равен 0.1. Тогда порядок астатизма н и коэффициент передачи разомкнутой системы K равны…
н=1, K=9.
н=0, K=10.
н=1, K=10.
н=0, K=9.
Вопрос № 27182
Если модулированный сигнал представляет собой последовательность импульсов, следующих через равные промежутки времени, одинаковых по длительности и различных по амплитуде, то речь идёт о…
широтно-импульсной модуляции
частотно-импульсной модуляции
фазо-импульсной модуляции
амплитудно-импульсной модуляции
Вопрос № 35008
Полностью инвариантная к возмущающему воздействию система…
имеет неединичный коэффициент главной обратной связи
имеет астатизм высокого порядка
имеет нулевой статический коэффициент передачи по возмущению
использует для управления производные возмущения
Вопрос № 35036
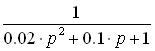
Выходной сигнал будет монотонно возрастать, если ступенчатый входной сигнал подать на звено с передаточной функцией
Вопрос № 69632
В устойчивой системе самое большое отношение мнимой части характеристического корня к его действительной части характеризует…
быстродействие
запас устойчивости
статическую точность
колебательность
Вопрос № 70056
Выходной сигнал будет монотонно возрастать, если ступенчатый входной сигнал подать на звено с передаточной функцией…
Вопрос № 78027
Метод аналитического конструирования регуляторов (АКОР) использует описание системы управления…
в частотной области
на плоскости корней характеристического уравнения разомкнутой системы
на плоскости корней характеристического уравнения замкнутой системы
в пространстве состояний
Вопрос № 78028
Метод модального управления состоит в…
минимизации некоторого интегрального критерия во временной области
обеспечении требуемых значений ошибок слежения в заданном диапазоне частот
придания заданного вида амплитудно-частотной характеристике разомкнутой системы
обеспечении заданного расположения на комплексной плоскости характеристических корней замкнутой системы
Вопрос № 78029
Положительная обратная связь позволяет…
понизить колебательность звена и повысить его быстродействие
повысить быстродействие и снизить коэффициент передачи
обеспечить устойчивость неустойчивому звену
повысить коэффициент передачи и снизить быстродействие
Вопрос № 78030
Для повышения запасов устойчивости и снижения перерегулирования можно использовать корректирующий фильтр…
ПИ-регулятор
дифференцирующего типа в цепи обратной связи
дифференцирующего типа в канале входного сигнала
дифференцирующего типа в прямой цепи
Вопрос № 79264
Для реализации полученного методом модального управления регулятора требуется…
использование пропорционально-интегрально-дифференциального-регулятора
использование параллельных корректирующих фильтров по всем звеньям системы
использование интегро-дифференцирующего фильтра в прямой цепи
измерение всех фазовых координат системы
Вопрос № 79271
Метод желаемых частотных характеристик предполагает использование в замкнутой системе…
нежёсткой главной обратной связи
комбинированного управления
компенсирующего фильтра в цепи возмущающего сигнала
последовательной коррекции
Вопрос № 79943
Если характеристический многочлен системы имеет корни
-0.4; -4+2i; -4-2i; -5,
то переходный процесс в системе затухает приблизительно за…
1.2 с.
0.6 с.
4 с.
7.5 с.
Вопрос № 80978
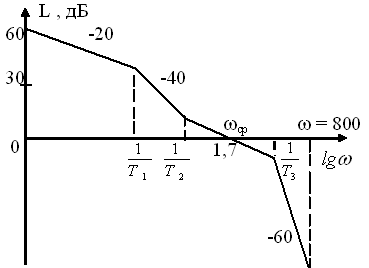
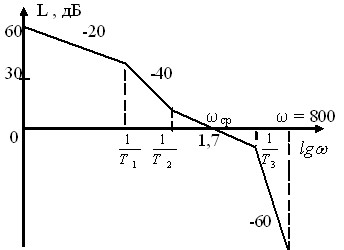
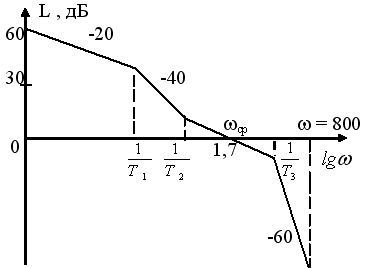
На рисунке показана асимптотическая логарифмическая амплитудно-фазовая частотная характеристика разомкнутой системы. Замкнутая система является…
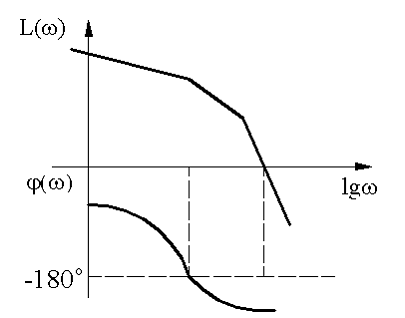
устойчивой астатической
устойчивой статической
неустойчивой статической
неустойчивой астатической
Вопрос № 83652
Метод желаемых частотных характеристик заключается в…
минимизации некоторого интегрального критерия в частотной области
придания заданного вида высокочастотной асимптоте амплитудно-частотной характеристики замкнутой системы
обеспечении требуемых значений ошибок слежения в заданном диапазоне частот
обеспечении заданного расположения низко- и среднечастотных асимптот амплитудно-частотной характеристики разомкнутой системы
Вопрос № 83716
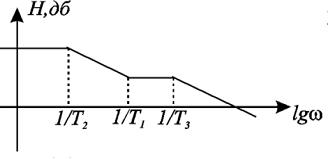
Желаемая логарифмическая амплитудно-частотная характеристика формируется таким образом, чтобы в разомкнутой системе обеспечить требуемую форму…
высокочастотной и низкочастотной частей ЛАЧХ
высокочастотной и среднечастотной частей ЛАЧХ
только среднечастотной части ЛАЧХ
низкочастотной и среднечастотной частей ЛАЧХ
Вопрос № 94300
Если сигнал на выходе элемента представляет собой разность задающего и выходного сигналов системы, то его называют…
чувствительным элементом
дифференцирующим элементом
преобразователем
элементом сравнения
Вопрос № 94302
Объект, у которого установившийся выходной сигнал при постоянном возмущении любого уровня пропорционален этому уровню называют…
неустойчивым
нейтральным
астатическим
статическим
Вопрос № 94305
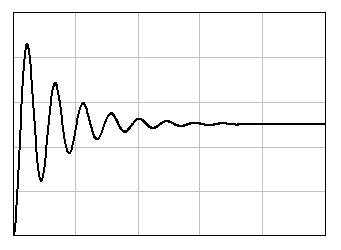
На рисунке изображена весовая функция (импульсная переходная характеристика) системы.
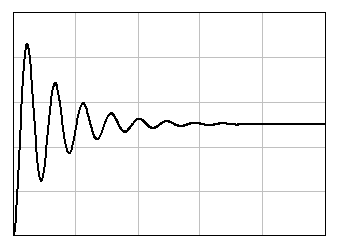
Эта система…
неустойчива
на колебательной границе устойчивости
устойчива
на апериодической границе устойчивости
Вопрос № 94308
В системе с передаточной функцией
установившийся отклик на входной сигнал 2 t + 1 имеет вид
0.5 t+2.15
1 t+0.6
2 t+1
2 t+0.8
Вопрос № 97225
Если задан характеристический многочлен системы и известны начальные значения выходной координаты и её производных, то можно найти…
переходную характеристику системы
вынужденное движение системы
частотные характеристики системы
свободное движение системы
Вопрос № 106211
Функциональная схема системы автоматического управления, характеризует…
математические описания элементов и связей между ними с учетом их физической природы
конструктивные особенности отдельных частей системы и их соединения
математическое описание взаимодействия отдельных частей системы
функции элементов и информационные связи между ними вне зависимости от их конкретной реализации
Вопрос № 107090
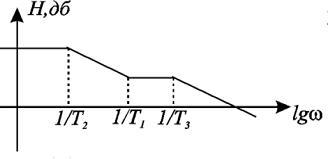
Системе с асимптотической логарифмической амплитудной частотной характеристике (ЛАЧХ), приведённой на рисунке,
соответствует передаточная функция…
Вопрос № 109198
Обычно повышение статической точности системы сопровождается…
снижением быстродействия и повышением колебательности и перерегулирования
снижением колебательности и перерегулирования и повышением быстродействия
снижением колебательности и повышением перерегулирования и быстродействия.
повышением быстродействия, перерегулирования и колебательности
Вопрос № 109294
Задача модального управления разрешима, если …
объект управления асимптотически устойчив
объект управления устойчив по Ляпунову
объект управления вполне наблюдаем
объект управления вполне управляем
Вопрос № 114085
К показателям качества регулирования не относится…
колебательность
перерегулирование
время регулирования
полоса пропускания системы
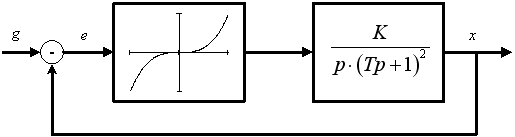
Вопрос № 118059
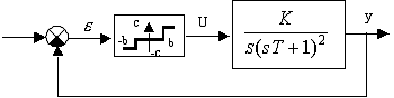
Представленная на рисунке система является…

импульсной
линейной
дискретной
нелинейной
Вопрос № 118060
Объект управления считают устойчивым, нейтральным или неустойчивым в зависимости от…
поведения при возникновении возмущений
величины его реакции на входной сигнал
поведения при отсутствии возмущений
поведения после прекращения действия возмущения
Вопрос № 118528
Установите соответствие между переходными характеристиками и передаточными функциями типовых звеньев
Вопрос № 119659
Если процессы в системе управления слабо зависят от параметров объекта управления, то такую систему называют…
устойчивой
астатической
нейтральной
грубой
Вопрос № 119769
В системе регулирования температуры движок утюга, регулирующий режимы глажения является…
чувствительным элементом
исполнительным элементом
элементом сравнения
задающим элементом
Вопрос № 119869
Выбор структуры и параметров дополнительных звеньев, обеспечивающих улучшение динамических свойств системы управления, называется…
прямой задачей управления
задачей анализа
обратной задачей управления
задачей коррекции
Вопрос № 119994
Представленная на рисунке система является…
нестационарной
линейной
стационарной
нелинейной
Вопрос № 141441
Систему, в которой установившаяся ошибка равна нулю при постоянном возмущении любого уровня, называют…
устойчивой
нейтральной
грубой
астатической
Вопрос № 146792
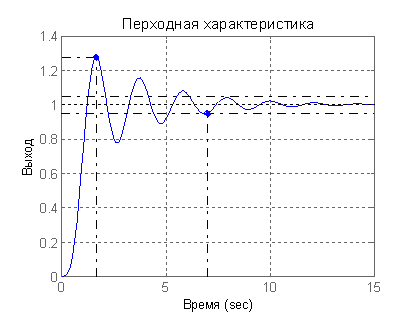
На рисунке представлена переходная характеристика системы управления. Коэффициент статической ошибки в системе равен…
Вопрос № 148156
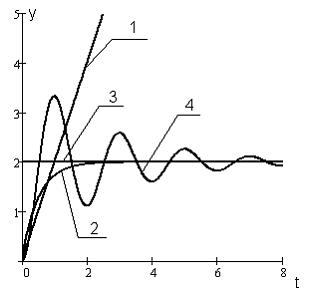
Среди переходных процессов, приведенных на графиках, наибольшую длительность переходного процесса имеет
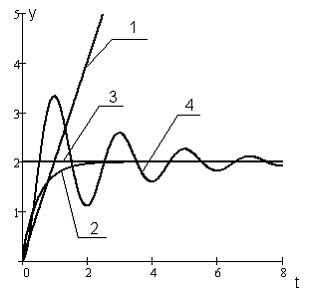
интегрирующее звено (1)
апериодическое звено (2)
усилительное звено (3)
колебательное звено (4)
Вопрос № 148187
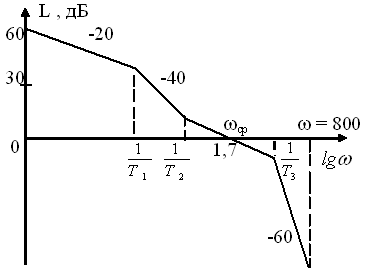
Системе с асимптотической логарифмической амплитудной частотной характеристике (ЛАЧХ), приведённой на рисунке,
соответствует передаточная функция…
Вопрос № 148382
Решение задачи модального управления не включает …
вычисление коэффициентов регулятора по всем фазовым координатам системы
вычисление коэффициентов характеристического многочлена
вычисление матрицы системы, преобразованной к канонической форме
формирование интегрального критерия качества системы
Вопрос № 151025
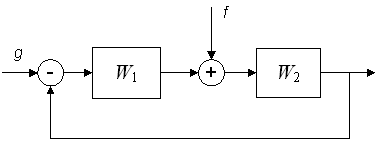
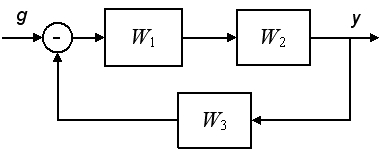
Передаточная функция W по входному возмущающему воздействию f системы, представленной на структурной схеме, имеет вид:
Вопрос № 153544
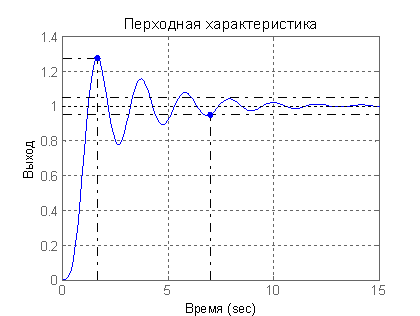
На рисунке представлена переходная характеристика системы управления. Время регулирования в этой системе составляет…
Вопрос № 156094
На рисунке крестиками обозначено расположение на комплексной плоскости корней li характеристического уравнения D(z)=0 замкнутой импульсной системы.
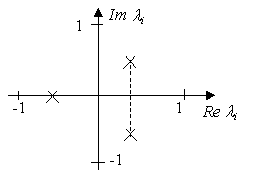
Эта система…
находится на границе устойчивости
находится на апериодической границе устойчивости
неустойчива
устойчива
Вопрос № 157060
На рисунке показана логарифмическая амплитудно-фазовая частотная характеристика разомкнутой системы. Замкнутая система является…
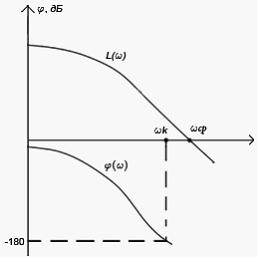
устойчивой статической
устойчивой астатической
неустойчивой астатической
неустойчивой статической
Вопрос № 157349
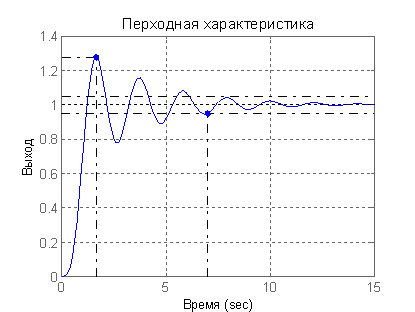
На рисунке представлена переходная характеристика системы управления. Перерегулирование в этой системе составляет…
Вопрос № 157356
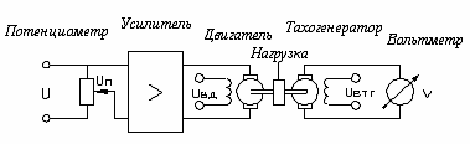
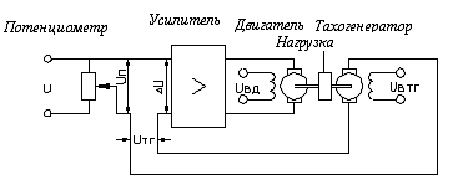
Задающим элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
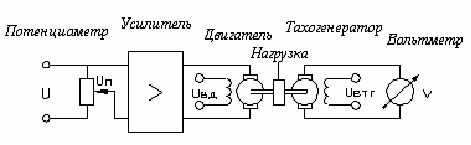
тахогенератор
электродвигатель
усилитель
потенциометр
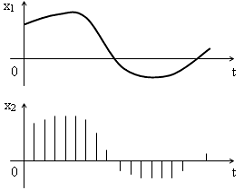
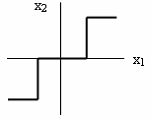
Вопрос № 157504
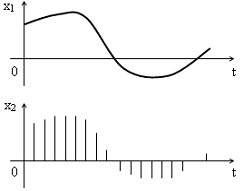
На рисунке представлены входной х1 и выходной х2 сигналы некоторого звена. Система, в которую входит такое звено, является…
нелинейной
релейной
цифровой
импульсной
Вопрос № 157518
Асимптотической ЛАЧХ, приведённой на рисунке, соответствует передаточная функция…
Вопрос № 157935
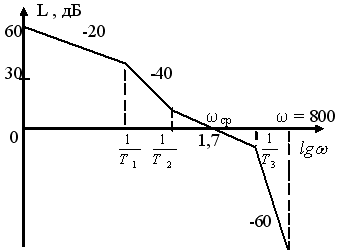
Системе управления, асимптотическая логарифмическая амплитудная частотная характеристика (ЛАЧХ) которой приведена на рисунке,
соответствует характеристический многочлен…
пятого порядка
второго порядка
третьего порядка
четвертого порядка
Вопрос № 158062
Изображённая на рисунке система, где

описывается дифференциальным уравнением…
Вопрос № 159626
Асимптотической ЛАЧХ, приведённой на рисунке, соответствует передаточная функция…
Вопрос № 160900
Системе управления, асимптотическая логарифмическая амплитудная частотная характеристика (ЛАЧХ) которой приведена на рисунке,
соответствует характеристический многочлен…
четвертого порядка
пятого порядка
второго порядка
третьего порядка
Вопрос № 162474
Для снижения колебательности звена его
можно охватить локальной отрицательной обратной связью…
с коэффициентом передачи больше единицы
подавляющей резонансную частоту звена
с отрицательным коэффициентом передачи
дифференцирующего характера
Вопрос № 162475
Если при отсутствии входных воздействий объект
управления может как сохранять положение покоя, так и совершать некоторые
незатухающие движения, то его называют
устойчивым
нейтральным
колебательным
неустойчивым
Вопрос № 162476
Устройство, формирующее сигнал, пропорциональный
отклонению управляемой (выходной) величины системы от ее заданного значения,
является…
исполнительным элементом
измерительным элементом
чувствительным элементом
элементом сравнения
Вопрос № 162477
Определение управляющего сигнала системы управления,
при котором выходной сигнал будет иметь заданный вид, называется…
прямой задачей управления
задачей коррекции системы управления
задачей синтеза системы управления
обратной задачей управления
Вопрос № 162871
Системе с асимптотической логарифмической амплитудной частотной характеристике (ЛАЧХ), приведённой на рисунке,
соответствует передаточная функция…
Вопрос № 163468
Передаточная функция замкнутой системы  .
.
Коэффициент чувствительности времени регулирования этой системы к постоянной времени T1 равен…
Вопрос № 163469
Метод аналитического конструирования регуляторов (АКОР) состоит в…
придания заданного вида амплитудно-частотной характеристике разомкнутой системы
обеспечении заданного расположения на комплексной плоскости характеристических корней замкнутой системы
обеспечении требуемых значений ошибок слежения в заданном диапазоне частот
минимизации некоторого интегрального критерия во временной области
Вопрос № 164159
Если при отсутствии входных воздействий объект управления может как сохранять положение покоя, так и совершать некоторые незатухающие движения, то его называют…
устойчивым
нейтральным
колебательным
неустойчивым
Вопрос № 164252
На рисунке изображена весовая функция (импульсная переходная характеристика) системы.
Эта система…
устойчива
на колебательной границе устойчивости
неустойчива
на апериодической границе устойчивости
Вопрос № 164254
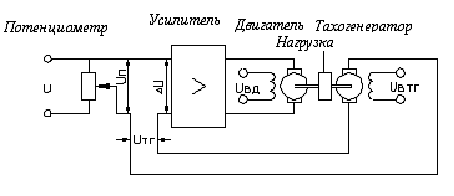
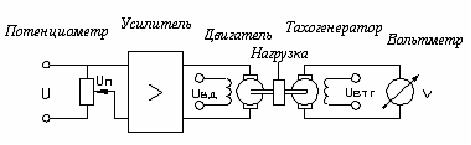
Объектом управления в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
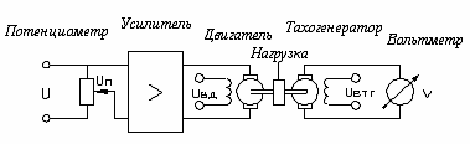
усилитель
потенциометр
тахогенератор
электродвигатель
Вопрос № 164255
Амплитудно-фазовая характеристика устойчивой разомкнутой системы представлена на рисунке. Замкнутая система…
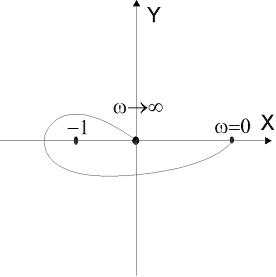
на апериодической границе устойчивости
на колебательной границе устойчивости
устойчива
неустойчива
Вопрос № 164256
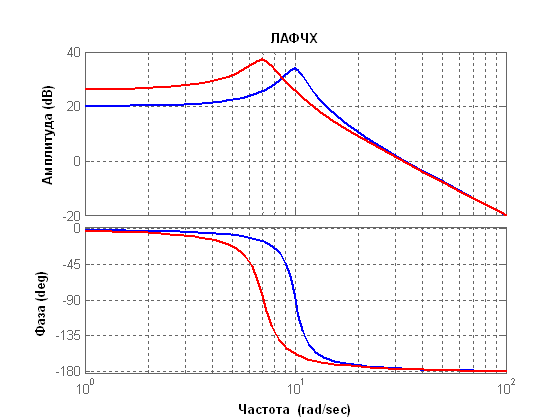
На рисунке синими линиями изображены частотки нескорректированного звена, а красными – скорректированного с помощью местной обратной связи. Корректирующий фильтр имеет характер…
интегрирующего звена
отрицательной обратной связи
дифференцирующего звена
положительной обратной связи
Вопрос № 165247
На рисунке изображена переходная характеристика системы.
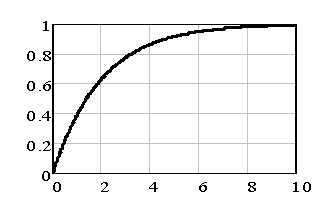
Эта система…
на колебательной границе устойчивости
на апериодической границе устойчивости
неустойчива
устойчива
Вопрос № 168097
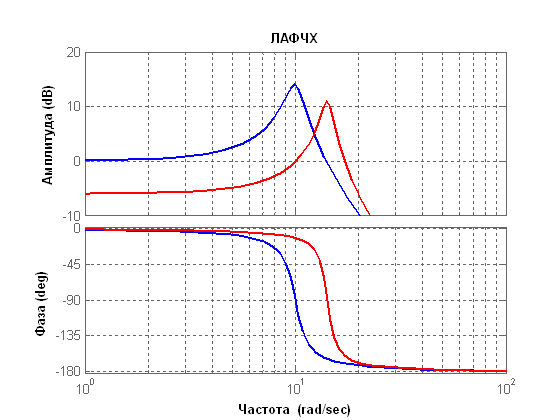
На рисунке синими линиями изображены частотки нескорректированного звена, а красными – скорректированного с помощью местной отрицательной обратной связи. Корректирующий фильтр имеет коэффициент передачи…
Вопрос № 169205
Элемент, в котором значение входного сигнала в некоторый момент времени t поступает на выход в течение последующего интервала времени (t, t+Дt), называется…
экстраполятором первого порядка
идеальным импульсным элементом
модулятором
экстраполятором нулевого порядка
Вопрос № 169361
Объектом управления в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
тахогенератор
усилитель
потенциометр
электродвигатель
Вопрос № 169362
Если для некоторых элементов системы величина выходного сигнала ограничена по модулю, то такую систему называют…
стационарной
линейной
нестационарной
нелинейной
Вопрос № 169424
Асимптотической ЛАЧХ, приведённой на рисунке, соответствует передаточная функция…
Вопрос № 402829
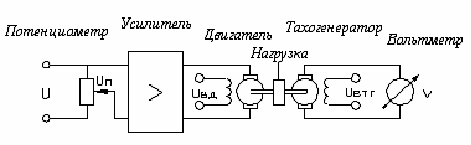
Чувствительным элементом системы автоматического управления скоростью вращения поворотного стола является…
электродвигатель постоянного тока
электродвигатель переменного тока
электронный усилитель
тахогенератор
Вопрос № 402831
Устройство, формирующее сигнал, подаваемый на систему и определяющий требуемое значение управляемой величины, является…
чувствительным элементом
исполнительным элементом
элементом сравнения
задающим элементом
Вопрос № 402832
Устройство, формирующее сигнал, пропорциональный отклонению управляемой (выходной) величины системы от ее заданного значения, является…
чувствительным элементом
исполнительным элементом
измерительным элементом
элементом сравнения
Вопрос № 402833
Чувствительным элементом системы автоматического регулирования температуры является…
электронагреватель
вентилятор
предохранитель
контактный термометр
Вопрос № 402836
Если сигнал на выходе элемента представляет собой разность сигналов с предыдущего и некоторого последующего элемента системы, то его называют…
дифференцирующим элементом
преобразователем
чувствительным элементом
элементом сравнения
Вопрос № 402837
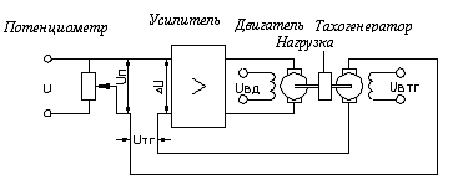
Чувствительным элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
потенциометр
усилитель
электродвигатель
тахогенератор
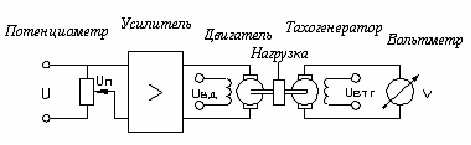
Вопрос № 402838
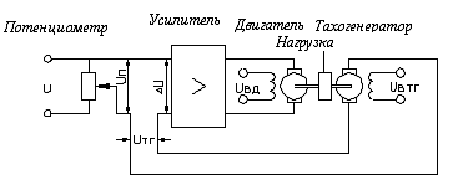
Усилительным элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
тахогенератор
электродвигатель
потенциометр
усилитель
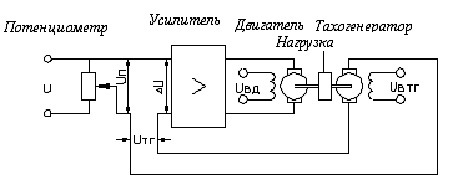
Вопрос № 402839
Задающим элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
усилитель
электродвигатель
тахогенератор
потенциометр
Вопрос № 402840
Объектом регулирования в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
усилитель
тахогенератор
потенциометр
электродвигатель
Вопрос № 402841
Элементом сравнения в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
электродвигатель
потенциометр
тахогенератор
усилитель
Вопрос № 402842
Чувствительным элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является… 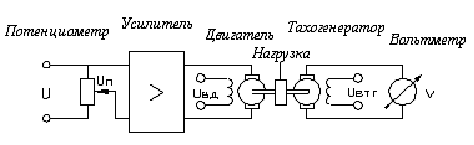
усилитель
электродвигатель
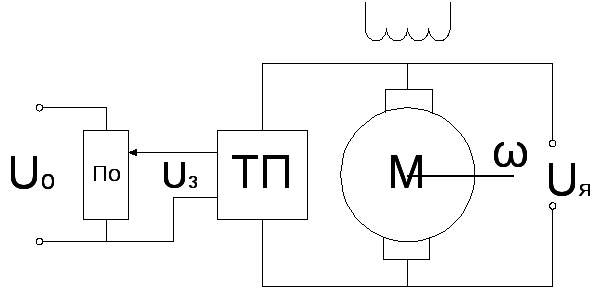
потенциометр
тахогенератор
Вопрос № 402843
Усилительным элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
потенциометр
тахогенератор
электродвигатель
усилитель
Вопрос № 402844
Задающим элементом в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
усилитель
электродвигатель
тахогенератор
потенциометр
Вопрос № 402845
Объектом управления в системе регулирования частоты вращения вала нагруженного электродвигателя, изображённой на рисунке, является…
тахогенератор
усилитель
потенциометр
электродвигатель
Вопрос № 402846
Представленная на рисунке система является…

дискретной
импульсной
линейной
нелинейной
Вопрос № 402847

Представленная на рисунке система, где
АЦП – аналого-цифровой преобразователь,
ЦАП – цифро-аналоговый преобразователь,
ЭВМ – электронно-вычислительная машина,
является…
релейной
нелинейной
импульсной
цифровой
Вопрос № 402848
Представленная на рисунке система является…
нестационарной
линейной
импульсной
нелинейной
Вопрос № 402849
Представленная на рисунке система является…
линейной
стационарной
нестационарной
нелинейной
Вопрос № 402850
Представленная на рисунке система является…
стационарной
линейной
нестационарной
нелинейной
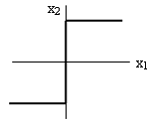
Вопрос № 402851
На рисунке представлены входной х1 и выходной х2 сигналы некоторого звена. Система, в которую входит такое звено, является…
нестационарной
релейной
нелинейной
импульсной
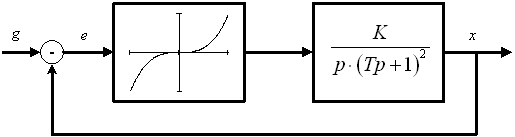
Вопрос № 402852
На рисунке представлена статическая характеристика некоторого звена. Система, в состав которой входит такое звено, является…
цифровой
импульсной
линейной
релейной
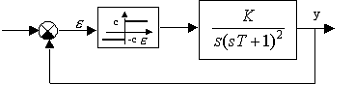
Вопрос № 402853
На рисунке представлена статическая характеристика некоторого звена. Система, в состав которой входит такое звено, является…
нестационарной
нелинейной
импульсной
релейной
Вопрос № 402854
Если при непрерывном сигнале на входе какого-либо звена системы на его выходе наблюдается квантование по времени или по уровню, то систему называют…
цифровой
релейной
нелинейной
дискретной
Вопрос № 402855
Система, содержащая элемент, выходной сигнал которого в каждый момент времени равен произведению его входных сигналов, называется…
линейной
дискретной
цифровой
нелинейной
Вопрос № 402856
Если динамика системы описывается дифференциальными уравнениями, коэффициенты которых меняются со временем, то такую систему называют…
нелинейной
дискретной
цифровой
нестационарной
Вопрос № 402858
Если при непрерывном сигнале на входе какого-либо звена на его выходе наблюдается квантование по времени, то систему называют…
нелинейной
цифровой
релейной
импульсной