Здравствуйте, на этой странице я собрала полный курс лекций по предмету «прикладная механика».
Лекции подготовлены для студентов любых специальностей и охватывает полный курс предмета «прикладная механика».
В лекциях вы найдёте основные законы, теоремы, формулы и примеры расчётов.
Прикладная механика — техническая наука, посвящённая исследованиям устройств и принципов механизмов. wikipedia.org/wiki/Прикладная_механика
Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу!

Что такое прикладная механика
Прикладная механика — это техническая наука, посвященная изучению устройств и принципов механизмов. Прикладная механика занимается изучением и классификацией машин, а также их разработкой.
Прикладная механика состоит из четырех разделов:
- Первый раздел содержит общие черты теории механизмов.
- Второй раздел посвящен основам сопротивления материалов — динамике и прочности инженерных сооружений.
- Третий раздел посвящен конструкции наиболее распространенных механизмов (в основном это кулачок, трение, шестерня).
- Четвертый раздел посвящен деталям машин.
Введение в прикладную механику
Последовательное развитие промышленности неразрывно связано с непрерывным совершенствованием машиностроения — основы технического перевооружения всех отраслей народного хозяйства. Инженерная техническая деятельность на основе научных исследований расширяет и обновляет номенклатуру конструкционных материалов, внедряет эффективные методы повышения их прочностных свойств. Появляются новые материалы на основе металлических порошков, порошков-сплавов. Порошковая металлургия приводит не только к замене дефицитных черных и цветных металлов более дешевыми материалами, но и позволяет получить совершенно новые материалы — «материалы века», которые невозможно получить традиционным путем. Кроме того, изготовление изделий из порошков — практически безотходное производство. Другое направление получения дешевых конструкционных материалов состоит в применении пластмасс, новых покрытий и т. п. Тончайшая пленка из порошковых смесей на поверхности детали, образуемая плазменным напылением, повышает надежность сопрягаемых и трущихся друг о друга деталей машин, защищает их от коррозии и существенно увеличивает их износостойкость.
Развитие машиностроения на современном этапе характеризуется комплексной механизацией и автоматизацией производства на основе широкого применения автоматических манипуляторов (промышленных роботов), встроенных систем автоматического управления с использованием микропроцессоров и мини-ЭВМ.
При внедрении в промышленность новых машин широко применяется модульный принцип создания оборудования, например, станок или несколько станков и манипулятор. На базе этого принципа создаются и вступают в строй не отдельные машины, а их системы — автоматические линии, цехи, заводы, обеспечивающие законченный технологический процесс производства конкретного изделия. Все это, вместе взятое, позволяет при снижении затраты материалов на изготовление и общей стоимости повысить их мощность, качество, производительность и сократить потребление энергии.
Успешное развитие современной промышленности в конечном счете зависит от качества и глубины профессиональной подготовки специалиста с высшим и средним образованием. Приобретение студентами технических университетов всех специальных знаний и навыков базируется на хорошей общетехнической подготовке, в основе которой наряду с другими лежат знания и навыки, полученные при изучении предмета «Механика».
Чтобы понять работу какой-либо машины, необходимо знать ее устройство, из каких элементов она состоит и как они взаимодействуют. А чтобы создать такую машину, нужно сконструировать и рассчитать каждую ее деталь. Настоящее учебное пособие посвящено в том числе и решению этой задачи — расчету и конструированию деталей машин общего назначения, деталей, без которых не обходится ни одна машина или механизм.
Расчеты деталей машин базируются на знании основ сопротивления материалов — науки о прочности и жесткости механических конструкций и методах их расчета.
Изучением самой простой формы движения материального мира, изучением перемещения тел в пространстве и взаимодействием их друг с другом занимается теоретическая механика. Перемещение тела относительно другого тела или изменение положения одного тела по отношению к другому называется механическим движением. Обычно теоретическая механика разделяется на три части: статику, кинематику и динамику. Статика — раздел теоретической механики, занимающийся изучением сил и условий их равновесия. Кинематика занимается изучением механического движения без учета действия сил. Динамика изучает законы механического движения с учетом действующих сил.
Изучением движения конкретных механических устройств, их анализом и синтезом занимается наука о механизмах и машинах — теория механизмов и машин. Основы знаний о механизмах, их устройстве, анализе приведены в данном учебном пособии. Курсы такого типа, но без раздела «Теоретическая механика» обычно называют прикладной механикой.
Элементы теории механизмов
Лекции:
- Структура (строение) механизмов
- Составные части механизма
- Классификация кинематических пар
- Кинематические цепи
- Степень подвижности кинематической цепи
- Принципы строения и структурная классификация механизмов
- Структурно-конструктивная функциональная классификация механизмов
Кинематика механизмов
Лекции:
- Задачи и методы кинематического анализа
- Кинематический анализ механизмов графическим методом
Динамический анализ механизмов
Лекции:
- Цели и задачи динамического анализа
- Силы, действующие на звенья механизма, и их классификация
- Трение в механизмах. Общие сведения о трении в механизмах
- Уравнения движения механизмов с одной степенью свободы. Приведение сил и масс в плоских механизмах
- Стадии (режимы) движения механизма
- Коэффициент полезного действия механизма
Сопротивление материалов
Лекции:
- Основные задачи сопротивления материалов
- Модели прочностной надежности
- Внешние и внутренние силы
- Понятие о напряжениях
- Основные гипотезы и допущения
Растяжение и сжатие
Лекции:
- Напряжения и перемещения. Закон Гука
- Механические характеристики и свойства материалов
- Допускаемые напряжения и запасы прочности
- Напряженное состояние при растяжении и сжатии
- Напряжения в наклонных площадках при плоском и объемном напряженных состояниях. Обобщенный закон Гука
Изгиб прямолинейного бруса
Лекции:
- Типы опор и определение опорных реакций. Общие понятия
- Поперечная сила и изгибающий момент
- Геометрические характеристики плоских сечений
- Напряжения при изгибе. Расчеты на прочность
Кручение
Лекции:
- Чистый сдвиг и его особенности
- Кручение стержня круглого поперечного сечения
- Расчеты на прочность и жесткость
- Напряженное состояние и разрушение при кручении
Сложное сопротивление
В отличие от простых видов деформации на практике нередки случаи, когда в поперечных сечениях бруса возникают сразу несколько внутренних силовых факторов. Такие случаи принято называть сложным сопротивлением. Расчеты на прочность и жесткость при сложном сопротивлении основываются обычно на принципе независимости действия сил. Необходимо заметить, что иногда указанные виды расчетов можно упростить, если пренебречь (в пределах требуемой степени точности) второстепенными деформациями и привести, таким образом, сложную деформацию к более простой.
Лекции:
- Теория прочности. Основные понятия
- Косой изгиб: определение, пример, формулы
- Изгиб с растяжением (сжатием)
- Изгиб с кручением: определение и формулы
Местные напряжения
Лекции:
- Видимые местные напряжения
- Концентрация напряжений определение и формулы
- Контактные напряжения: определение и формулы
Прочность материалов при переменном напряжении
Лекции:
- Усталостная прочность: основные понятия
- Предел выносливости при симметричном цикле. Диаграмма пределов выносливости
- Факторы, влияющие на величину предела выносливости
- Расчеты на прочность при переменных напряжениях
Основы взаимозаменяемости и конструкционные материалы
Лекции:
- Принципы построения единой системы допусков и посадок
- Отклонения формы и расположения поверхностей
- Шероховатость поверхностей: определение и формулы
Конструкционные материалы
Лекции:
Ответственный момент процесса проектирования — выбор материалов для деталей и узлов механизмов, который осуществляется конструктором. Необходимо обеспечить работоспособность, надежность и выполнить некоторые специальные требования. Например, для механизмов авиационной и космической техники основными требованиями являются обеспечение минимальной массы и габаритных размеров; для деталей, работающих при трении скольжения, — износостойкости, при повышенных температурах — теплостойкости и др. Технологические характеристики материалов должны соответствовать способам получения заготовок (литье, штамповка, резанье) и виду производства (серийное или массовое). Важное значение имеет стоимость выбранного материала.
Лекция:
- Конструкционные материалы: виды, свойства, определение, характеристики
Композиционные материалы
Лекция:
- Композиционные материалы
Неметаллические материалы
Лекция:
- Неметаллические материалы
Механические передачи
Лекции:
- Механические передачи: общие сведения
- Геометрия в кинематике: краткие сведения
- Изготовление зубчатых колес: определения, формулы, расчёты
- Расчет прямозубых цилиндрических передач на прочность
- Особенности расчета косозубых и шевронных цилиндрических передач
- Конические зубчатые передачи: общие сведения и характеристика
- Червячные передачи: общие сведения и характеристика
- Глобоидные передачи: общие сведения и характеристика
- Ременные передачи: общие сведения и характеристика
- Муфты: общие сведения и характеристика
Эти дополнительные страницы возможно будут вам полезны:
- Задачи прикладной механики
- Решение задач по прикладной механике
- Курсовая работа по прикладной механике
- Контрольная работа по прикладной механике
- Теория из учебников по прикладной механике тут
- Помощь по прикладной механике
- Заказать работу по прикладной механике

Курс лекции по дисциплине «Прикладная механика»
Для
специальности «Оптотехника»
Автор:
к.т.н., доцент Осипов В.И.
Введение
Прикладная
механика является одной из старейших
отраслей наук, возникновение и развитие
которой обусловлено потребностями
практики.
Широко
известно, что еще в древности, например
при постройке египетских пирамид и
других сооружений, люди применяли
простейшие механизмы и механические
устройства: рычаги, блоки, наклонные
плоскости и т.д. Однако наиболее бурное
развитие прикладной механики следует
отнести к более позднему времени, когда
в результате накопления опыта стали
возможны некоторые обобщения и
определенное формирование методов этой
науки.
Курс
прикладной механики объединяет многие
дисциплины: теоретическую механику,
сопротивление материалов, теорию
механизмов и машин, детали машин и
приборов, основы конструирования и др.
Научными
основами прикладной механики являются
математика и теоретическая механика.
Существенное значение для проектирования
деталей машин и приборов имеет курс
сопротивления материалов, технологии
конструкционных материалов, сварки и
д.р.
Теория
механизмов и машин представляет собой
один из важных разделов прикладной
механики, в котором изложены методы
исследования и построения механизмов
и машин. Под исследованием механизмов
и машин понимают изучение движения
звеньев машин и их точек. Построение,
или синтез механизмов представляет
собой разработку рациональных методов
определения параметров механизмов
машин и приборов по заданным функциям
их движения.
Часть
курса, посвященная деталям машин,
представляет собой раздел прикладной
механики, в котором изложены методы
расчета и рационального конструирования
деталей и сборочных единиц (узлов) общего
применения, т.е. присущих любой машине,
независимо от ее назначения.
Таким
образом, курс прикладной механики
составляет теоретическую основу
современного машиностроения.
В
зависимости от инженерной специальности
объем курса прикладной механики
варьируется в достаточно больших
пределах. Кроме того, как правило, многие
дисциплины курса, такие как теоретическая
механика, сопротивление материалов,
технология конструкционных материалов,
теория сварки и т.д. читаются студентам
отдельно на разных стадиях обучения.
В
данном курсе основное внимание будет
уделено теории механизмов, деталям
приборов и основам проектирования.
Тема
№1 Основы классификации механизмов.
Основные понятия и определения.
Курс
изучает общие свойства, характеристик
для механизмов и машин, методы исследования
и проектирования на схемном уровне. При
этом имеют место две основные задачи:
задачи синтеза и задачи анализа машин
Это
можно представить так:

Говоря
о машине как таковой, мы представляем
её в виде структурной схемы, т.е.
изображение без масштаба, отражающую
лишь структуру механизма. Если схема
дается в масштабе то имеет место
кинематическая схема (она позволяет
определить кинематические параметры
машины)
Дадим
определение термина “Машина”, и введем
основные понятия:
Машина
состоит: из одного или нескольких
машинных агрегатов
М![]() ашинный
ашинный
агрегат:
Механизмом
называется система тел, предназначенная
для преобразования движения одного или
нескольких тел в требуемые движения
других тел. Бывают пространственные и
плоские механизмы
Звено
– деталь или несколько деталей механизма,
движущихся как одно целое
Механизмы
классифицируются по виду звеньев:
-
С
твердыми телами -
С
упругими звеньями (пружины, торсионы
и т.д.) -
Винтовые
-
Храповые
-
Гидромеханизмы
-
Пневмомеханизмы
И
т.д.
Кинематическая
пара
– подвижное соединение двух звеньев
взаимоограничивающее их движение.(одно
из звеньев может быть неподвижным –
стойка)
Кинематические
пары классифицируются :
1.По
виду контакта : на низшие и высшие
а)
У высших контакт по (.) или по линии.
б)
У низших контакт по поверхности.
(Достоинство
а): различные законы движения, недостаток
— велики удельные нагрузки)
2.По
степеням свободы: (По числу ограничений
накладываемых на относительное движение
звеньев)
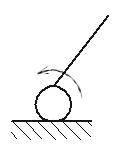
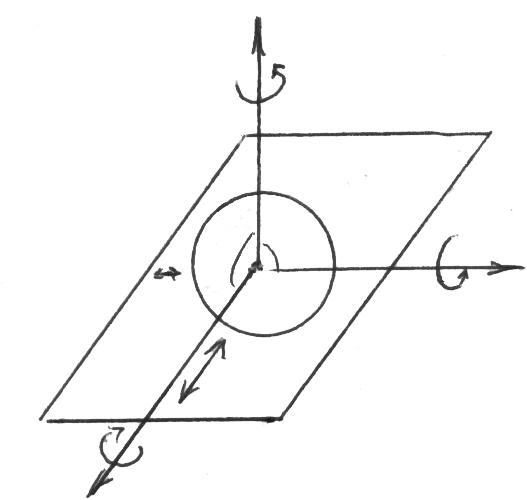 а).I
а).I
Класс – шар на плоскости
5
ст. свободы (высшая кинемат. Пара)
|
|
— |
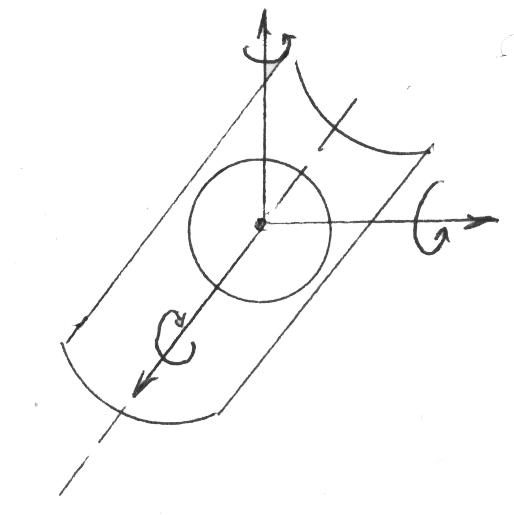 б).
б).
II
Класс
4
ст. свободы
|
|
— |
в ).III
).III
Класс – сферический шарнир
3
ст. свободы
|
|
— |
 г).
г).
IV
Класс – 2 ст. свободы
Внешняя
плоская пара
|
|
— |
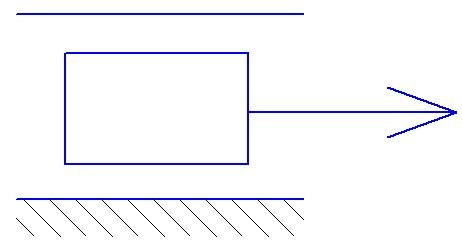
д).
V
Класс – 1 ст. свободы
|
|
— |
Кинематическая
цепь
: Кинематические пары между собой
связываются; поэтому связанная
совокупность звеньев, образующих
кинематические пары называется
кинематической
цепью.
Классифицируются
кинематические цепи:
-
Пространственные
и плоские -
Простые
и сложные (простая , когда звено входит
не более чем в две кинематические пары) -
Замкнутые
и разомкнутые
Примеры:
|
Пространственная, |
Плоская, |
|
|
|
Подавляющее
большинство механизмов состоит из
замкнутых кинематических цепей.
Структурная
формула кинематической цепи:
Она
отвечает на вопрос : сколько степеней
свободы имеет данная кинематическая
цепь? Какова ее подвижность?
Рассмотрим
любую кинематическую цепь из k-звеньев.
Кинематические пары цепи обозначим P1
– кп 1 кл; P2
– кп 2 кл; …. P5
– кп 5 класса.
Без
учета кинематических пар, k
звеньев имеют 6-k
степеней свободы
Тогда:
![]() — Общее
— Общее
количество ограничений кинем. цепей
Подвижность
цепи:
![]() (1) – общая структурная
(1) – общая структурная
формула
пространственной кинемат.
цепи
Если
одно звено неподвижно, то
![]() (2) ,
(2) ,
где n
– число
подвижных звеньев
Для
плоской цепи:
![]()
![]() —
—
Формула Чебышева
Из
вышесказанного можно дать структурное
определение механизма: Механизмом
называется замкнутая кинематическая
цепь с одним неподвижным звеном в которой
при заданном законе движения одного
или нескольких звеньев, называемых
ведущими, все остальные звенья (ведомые)
имеют вполне
определенное
движение
В
механизме могут быть избыточные связи
называемые пассивными:
|
|
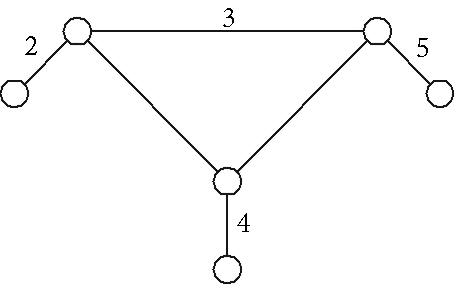
Структурный
анализ механизма включает в себя:
1.
Определение структуры механизма
2.
Количества подвижных звеньев
3.
Количества кинематических пар и класс
кинематических пар
4.
Определение подвижности механизма
5.
Определение количества ведущих звеньев
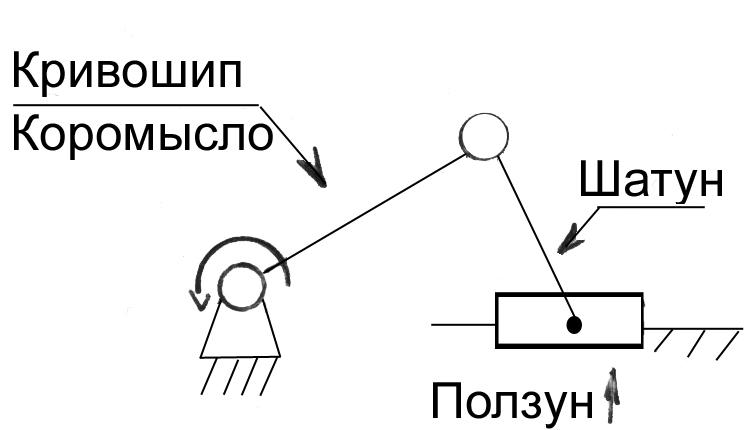
Тема
№2 Рычажные механизмы.
Отличительные
особенности – в их состав входят только
низшие кинематические пары. Для
пространственных рычажных механизмов
пары 5 кл. (вращат. и поступат.)
4
кл. (цилиндрические ) 3 кл.
– сферические механизмы. Для плоских
механизмов – только пары 5го класса
Достоинства:
1. Высокая нагрузочная способность
(винтовые пары по поверхности)
2. Относительная простота и дешевизна
Недостатки:
1. Небогатый выбор движений на выходе
(возвратно-поступательное или вращательное)
2.
Сложность метрического синтеза, т.е.
расчета размеров механизма при котором
достигается требуемый закон движения
на выходе.
О
классификации рычажных механизмов
В
основу классификации положен структурный
признак. Любой рычажный механизм состоит
из 3-х видов элементов.
1.
Одного (весьма редко нескольких) исходного
механизма (подвижность его ω = 1)
2.
Любого числа наиболее простых
кинематических цепей с нулевой
подвижностью (ω = 0). Такая цепь называется
группой Ассура.
3.
Любого числа пассивных звеньев (элемент
необязательный и может отсутствовать).
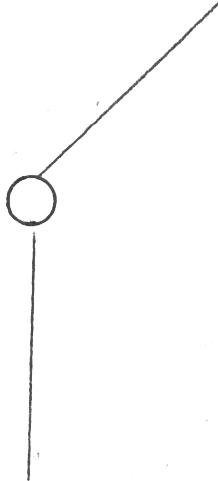
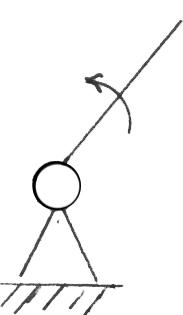
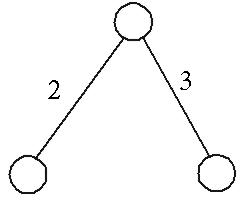
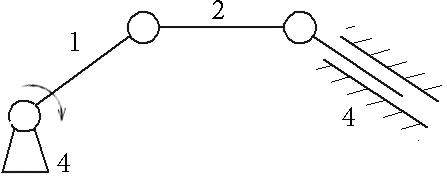
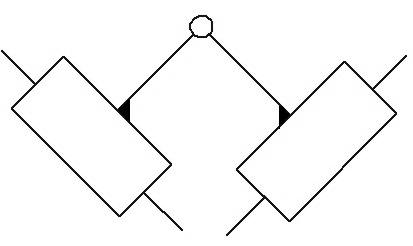
Исходный
механизм может быть только двух видов:
|
|
|
![]()
Исходных
механизм I
класса. I-го
порядка, в каждом сложном механизме.
Классификация
структурных групп
Структурная
группа – это простейшая кинематическая
цепь обладающая нулевой подвижностью.
Структурная
формула группы Асура:
![]() (1)
(1)
Для
плоских механизмов могут быть только
пара 5-го класса (частный случай 1 P4
в 2 P5)
Из
(1) следует
![]() —
—
число подвижных звеньев, входящих в
группу (только
четное , т.е. n
= 2, 4, 6, 8
Также
следует, что
![]() — число кинематических пар 5го класса –
— число кинематических пар 5го класса –
кратно трем (3, 6, 9, 12)
Отсюда
следуют:
Признаки
группы Ассура:
-
В
группе Ассура должно быть четное число
звеньев; -
Они
входят или могут входить в число
кинематических пар, кратное 3-м; 3;6;9;12 -
Группу
Ассура нельзя мысленно разбить на более
простые цепи с W
= 0 -
Если
группу Ассура со свободными элементами
пар присоединить к одному и тому же
звену (стойке) то получится жесткая
ферма.
Все
группы Асура делятся на 3 класса (2,3,4)
(1
кл. отдан исходному механизму)
I Группы
2-го класса(диады)
n=2
, P5
= 3- все эти группы являются 2-х поводковыми,
т.е. 2-й порядок.
Поводок
– звено имеющее свободный элемент
кинематической пары
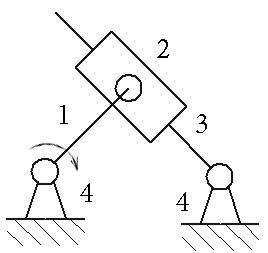
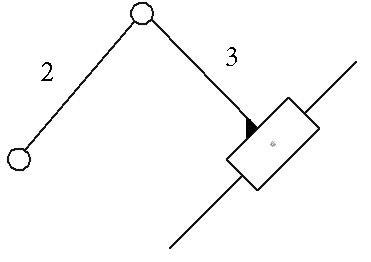
Имеется
5 видов диад: (идет замена вращательной
пары поступательными)
|
1
В (В |
|
|
2
В (П |
|
|
3
В |
|
|
4
В |
|
|
5
П |
|
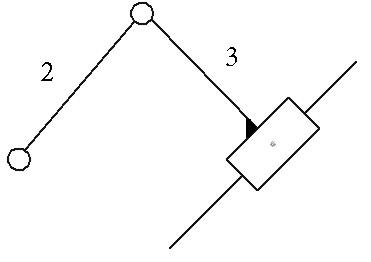
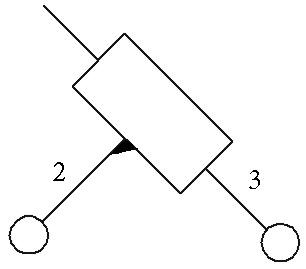
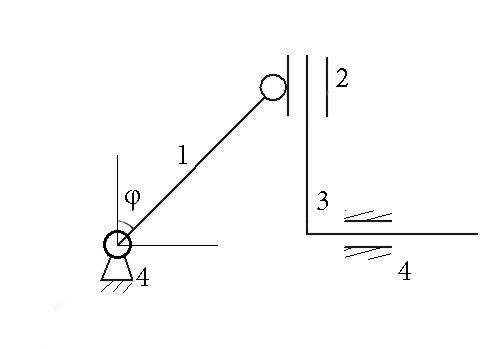
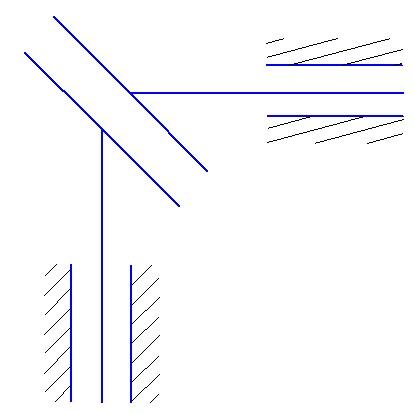
6
вида не существует, т.к. он является
исключением (П-П-П) после присоединения
к стойке не образует ферму, а преобразуется
в клиновой механизм
|
|
= |
|
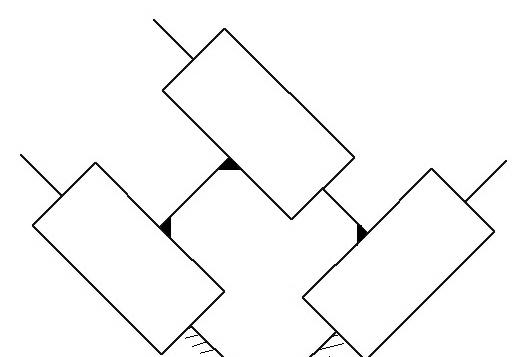
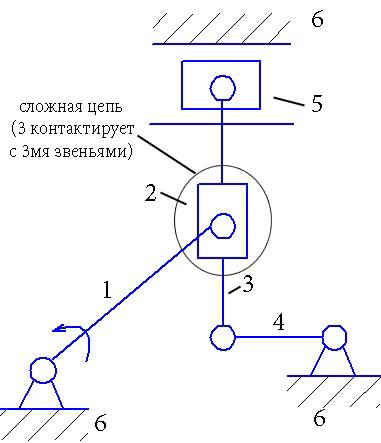
II Группы
3-го класса (триада – трехповодковая
группа)
Характеристический
признак : наличие
хотя бы одной сложной цепи.
|
ω = 0 |
ω = 1 |
|
3-й
3-й
N P5 |
Любая
вращательная пара может быть заменена
на поступательную , кроме одной (одну
надо оставить)
|
|
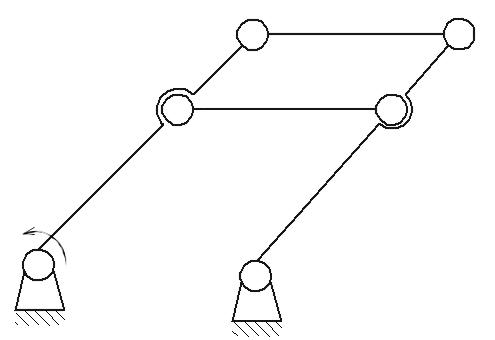
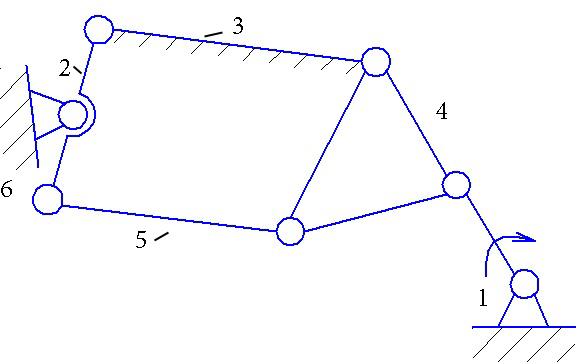
III Группы
4-го класса
Характеристический
признак: наличие замкнутого контура
звеньев.
|
|
4-й
2-й n=4 |
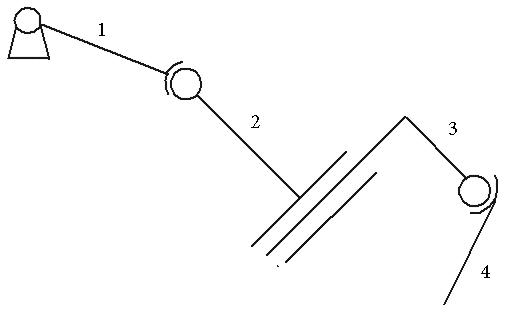
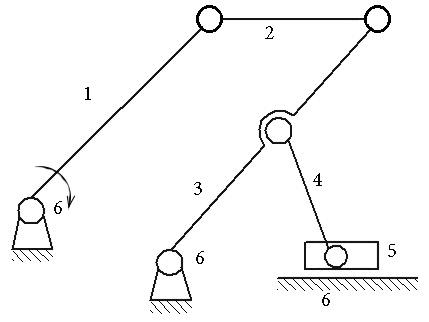
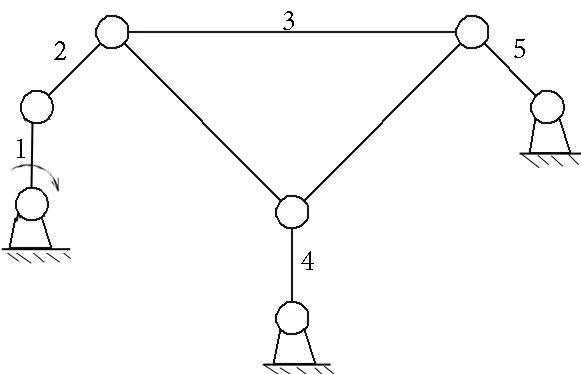
Структурный
анализ рычажного механизма
1.
Определить подвижность и выделить
исходный (главный) механизм
2.
Мысленно отделить остающуюся цепь от
исходного механизма и разбить на гр.
Ассура.
3.
Определить класс и порядок каждой
группы.
4.
Всему механизму присвоить класс и
порядок старшей группы.
Синтез
осуществляется путем присоединения к
исходным механизмам любого числа
структурных групп
О
кинематическом анализе (синтезе) рычажных
механизмов
Задача
: определение кинематических параметров
механизма (угловых или линейных
перемещений , скоростей, ускорений
звеньев или отдельных точек)
Замечание:
Чем выше класс и порядок механизма тем
сложнее его кинематический анализ
Методы:
-
Экспериментальные:
дают наиболее достоверные результаты.
Недостатки:
требуется лабораторное оборудование
(измерительное, регистрирующая аппаратура,
образец механизма).
-
Графические
: планы механизмов, скоростей, ускорений;
графическое интегрирование,
дифференциальное и т.д.
Достоинство:
простота, наглядность
Недостатки:
необходимость выполнения построений
графически, с применением чертежных
инструментов в масштабе, иногда невысокая
точность.
-
Аналитические:
не требуют графических построений,
обеспечивают сколь угодно точный
результат.
Недостатки:
громоздкость расчетов.
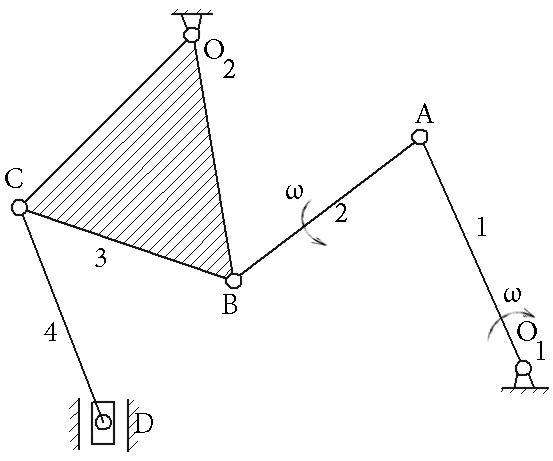
Тема
№3 План скоростей и ускорений.
Дано
: ω1
= 0
Размеры
всех звеньев
Определить
: Кинематические
параметры
-
План
скоростей – геометрическое построение,
представляющее совокупность векторов,
отображающих скорость любой точки
механизма (последовательно определяем
линейную скорость и w
любой точки и звена механизма)
![]()
![]()
![]()
![]()
Как
строить план скоростей?
|
|
|
|
┴BO2
┴BO2 |
∆ — ↑ — Pv (Кv) |
|
|
Вертик. |
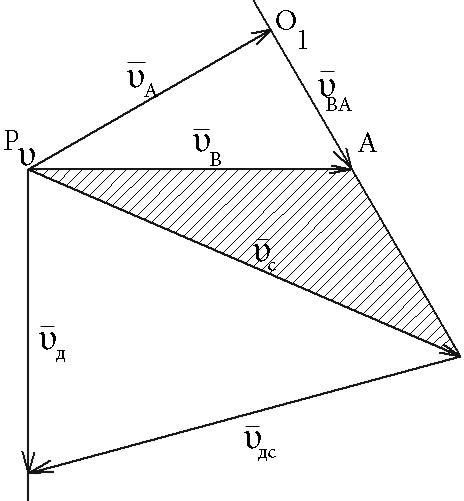
Правила:
-
План
скоростей звена является геометрическим
местом концов векторов скоростей всех
точек данного звена. -
План
скоростей звена подобен звену и повернут
по отношению к этому звену на 90 градусов
Зная
линейные скорости любых точек определяем
угловые скорости любого звена:
![]() ;
;
![]() ;
;![]() ;Направление
;Направление
вращения звена, т.е. знак ω2
, ω3,
ω4
определяется просто
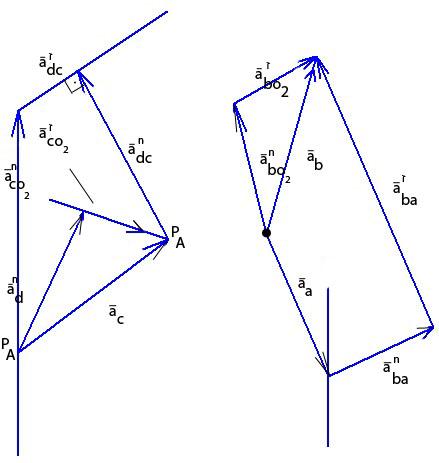
План
ускорений
При
ω1
=
const:
![]()
![]() ,
,
т.к.
![]()
но
![]()
Решение:
векторный замкнутый многоугольник
![]() (4)
(4)
![]() (5)
(5)
Здесь:
![]() ;
;![]()
Масштабный
коэффициент
![]()
PA
– полюс
плана ускорений
|
|
Угловое
|
Метод
позволяет определить угловое ускорение
звена
![]()
Аналитические
методы
-
метод
векторных контуров
Механизм
представляется в виде одного или
нескольких замкнутых векторных контуров
(это можно сделать т.к. звено, аналогично
вектору, имеет величину и направление)
Метод
удобен когда необходимо определить
угловые параметры: угловое ускорение,
скорость, узловые перемещения звена
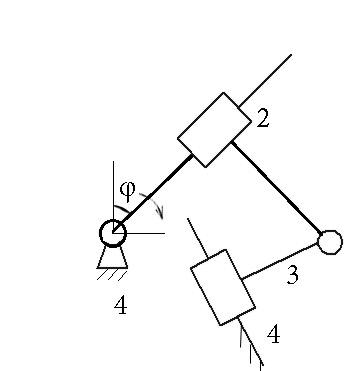
Дано:
l1,
l2,
l3,l4
ω1
= const; φ1
Найти:
φ2
φ3
ω2
ω3
ξ2
ξ3
|
|
|
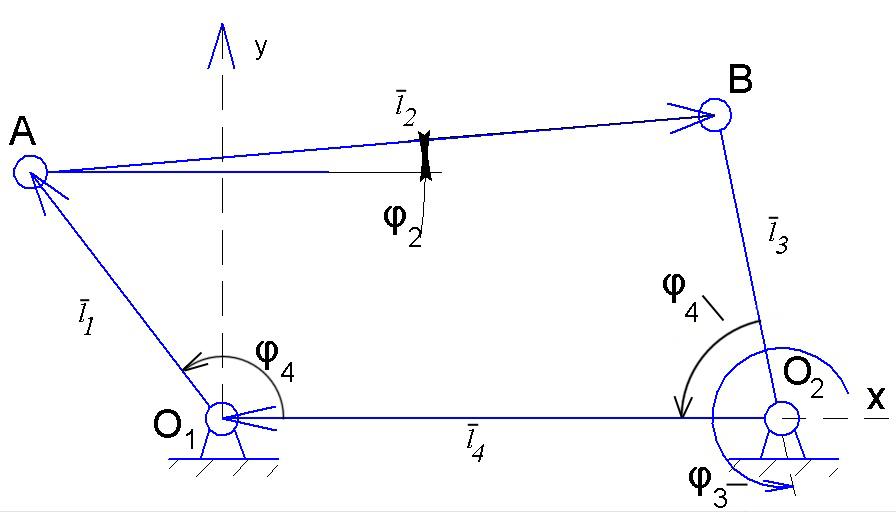
Проецируем
на оси координат:
На
ось х:
![]() (2)
(2)
На
ось у:
![]() (3) решая их, найдемφ2
(3) решая их, найдемφ2
и
φ3
Продиффиринцируем
систему помня, что
![]() ;
;
![]() ;
;![]()
![]() (4)
(4)
![]() (5)
(5)
найдем ω2
и
ω3
Дифференцируем
2-й раз, учитывая, что
![]() (т. к. ω1
(т. к. ω1
= const)
![]() ;
;
![]()
![]() (6)
(6)
![]() (7)
(7)
найдем ξ2
и
ξ3
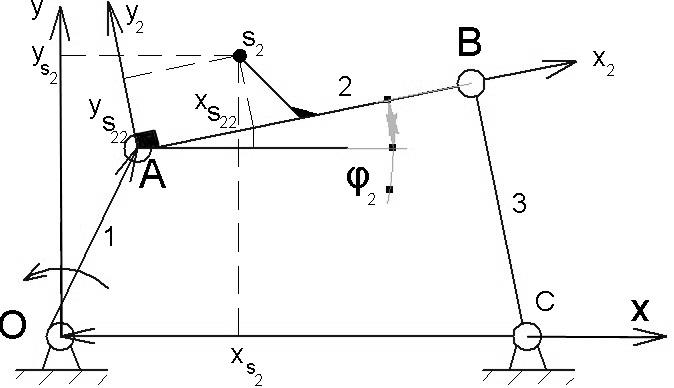
-
Метод
преобразования координат
(повернутых координат)
Пригоден
для определения линейных кинематических
параметров характерных точек ( в него
входит метод векторных контуров; угловые
параметры φi
ωi
ξi
известны )
Суть
метода : с каждым звеном механизма
(включая стойку) связывается (жестко)
своя система координат движущаяся
вместе со звеном
Обозначим
координаты точки S , X22
и Y22
— const
(конструктивные параметры) φ2
известно из метода векторных контуров.
Связь
между системами координат:
|
|
Обозначим |
Тогда
связь между координатами:
![]()
![]()
Запишем
в матричной форме
![]() (8)
(8)
Дифференцируем
(8) два раза последовательно по времени,
получим:
![]() (9)
(9)
![]() (10)
(10)
(8);
(9); (10) позволяют последовательно
определить все величины
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;
![]() и
и
далее определить кинематические
параметры следующего звена. Работает
только с методом векторного контура,
т.к. необходимы угловые параметры.
Два
последних метода удобны для расчетов
на ЭВМ, для расчета «в ручную» они не
удобны. Можно перебирать множество
вариантов чтобы получить механизм
удовлетворяющий выдвигаемым требованиям.
О
синтезе рычажных механизмов (замечание)
Дано:
структурная схема механизма, его функция
положения или её производная
Найти
: размеры звеньев механизма, при котором
эта функция обеспечивается
Решение:
-
Выполняется
элементарно -
Может
быть выполнено очень приближенно -
Решение
невозможно вообще
-
Условие
существования кривошипа
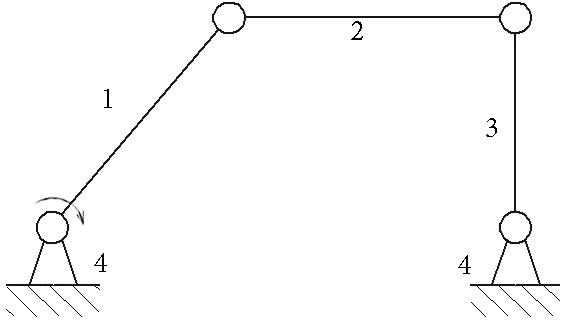
В
состав многих механизмов входит шарнирный
4-х звенник. (возникает вопрос – когда
он может совершить полный оборот?)
|
|
Дано: AB BC CD DA= Найти |
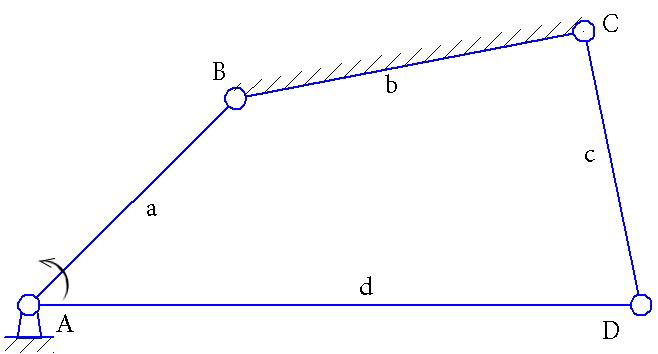
![]() (11)
(11)
-
Если
стойка
b
или d,
то a
– кривошип; b
или d
– шатун; с – коромысло -
Если
стойкой
является a,
то b;d
– крипошипы, с – шатун -
Если
стойкой
является с,
то нет кривошипа
Если
заменить (11) равенством, то механизм
превращается в предельный механизм. В
одном из положений все звенья вытягиваются
вдоль одной прямой – мертвое положение
(неопределенное)
Теорема
Грасгофа:
Для того чтобы звено a
было кривошипом, необходимо и достаточно,
чтобы оно было наименьшим из всех звеньев
и сумма его длины и длины любого из
звеньев была меньше суммы длин оставшихся
звеньев.
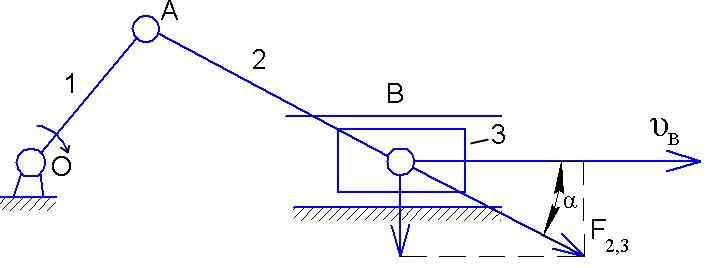
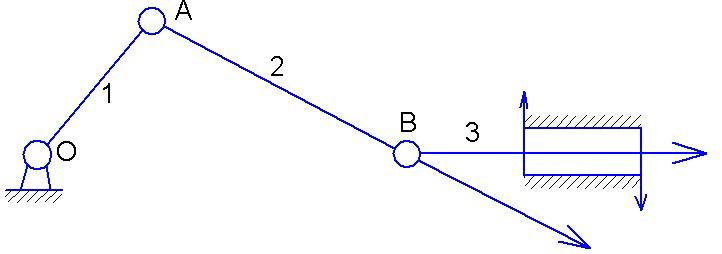
-
Условие
рациональной передачи сил
Динамическое
условие, учитывается при проектировании
любой кинематической схемы.
Понятие
угла
давления
(α) — угол между направлением вектора
силы F,
передающим усилие с одного звена на
другое и направлением вектора скорости
точки приложения силы (силой трения
пренебрегаем)
|
|
|
|
|
Если |
Тема
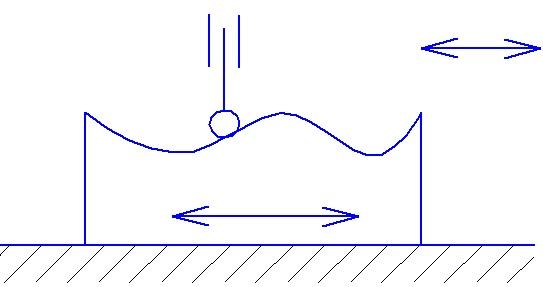
№4 Кулачковые механизмы.
Присутствует
1 звено (по очертанию напоминает кулачок)
имеющее профиль переменной кривизны.
Назначение
– преобразование простого движения на
входе (вращение, пост. Движение), в более
сложное движение на выходе, включая
выстои (кулачек движется, звено
неподвижно). Поэтому кулачки широко
используются в управляющих механизмах.
Используется
вращательное движение с ω = const
(Иногда кулачек неподвижен – копир)
|
|
Типы
кулачковых механизмов : плоские
и пространственные,
наиболее распространены первые.
Достоинства
кулачковых механизмов:
-
Широкий
набор возможных движений на выходе
(определяется формой кулачка) -
Простота
перехода на другой закон движения на
выходе (смена кулачка) -
Простота
согласования работы нескольких
механизмов (распределит. Вал) -
Простота
синтеза кулачковых механизмов (если
график S(φ)
известен то получим профиль кулачка)
Недостатки
-
↓
→
┴
→

Невысокая
нагрузочная способность из за наличия
высшей кинематической пары (контакт
по точке или линии) Можно несколько
улучшить
-
Необходимость
замыкания кинематической пары (силовое,
геометрическое) -
Сложность
изготовления кулачка
Кулачковый
механизм состоит из 3х звеньев: стойка,
кулачок(ведущее звено), ведомое
звено(толкатель или коромысло , в
зависимости от вида движения)
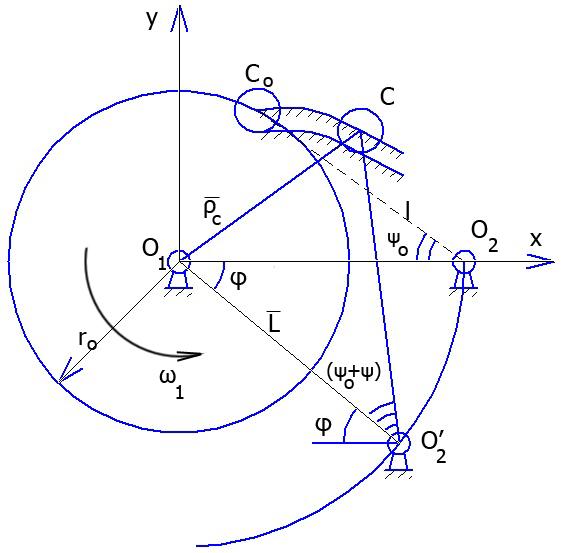
Основные
элементы кулачка и кулачкового механизма
(на
примере механизма с толкателем)
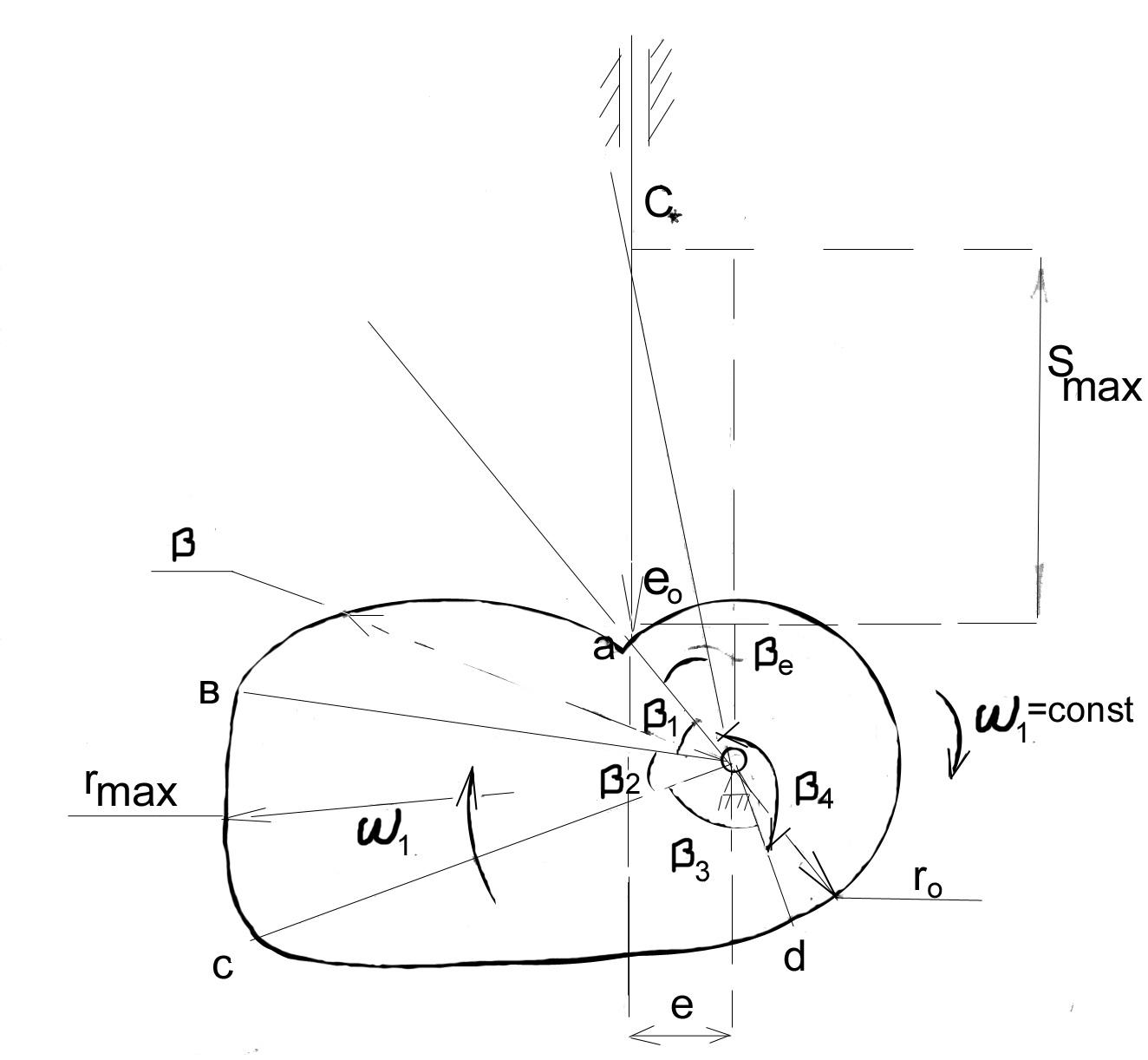
e
– эксцентриситет
1)
ab
– участок профиля удаления
ρ
— радиус-вектор кулачка,
![]()
ro—
радиус базовой окружности
2)
bc
– участок профиля дальнего выстоя
(кулачек
вращается, ведомое звено неподвижно).
![]()
3![]() )cd
)cd
– участок профиля возвращения
4)
da
– участок профиля ближнего выстоя ![]()
(кулачок
вращается, ведомое звено не подвижно)
точка ![]()
верхнее положение при ![]()
![]() —
—
угол удаления, повороты кулачка
соответствующие выполняемым толкателем
фазы удаления (фазовые узлы кул. мех.)
![]() ;
;
![]() ;
;![]() ;
;![]()
Где
![]() — угол эксцентриситета, зависит от
— угол эксцентриситета, зависит от
величины знак (+), когда толкатель сдвинут
навстречу набегающему профилю
![]()
![]()
![]() ,
,![]() ,
,![]() ,
,![]()
Где
Т – продолжительность полного оборота
(цикла) кулачка
Диаграмма
отрезков
![]()
, ![]()
называется циклограммой работы механизма
О
центровом и рабочем профиле кулачка
Центровым
называется профиль кулачка, который
контактирует с заостренным ведомым
звеном (используется в приборных
механизмах, большой износ).
Для
перехода к рабочему профилю нужно учесть
профиль ведомого звена.
Рабочий
профиль
является огибающей семейства профилей
ведомого звена при его обращенном
движении относительно кулачка.
Кинематический
анализ К.М.
Задача:
определение закона движения выходного
звена при заданном законе движения
кулачка (например ω1
= const
)
Существует
3 способа решения:
-
-
Экспериментальный
-
Графический
обычно
основываются на методе инверсии-
Аналитический
-
|
|
Синтез
кулачкового механизма
Общая
постановка задачи: Даны законы движения
кулачка и ведомого механизма. Требуется
построить кинематическую схему механизма
включая профиль кулачка.
-
Выбор
типа механизма
Определяется
общей компоновкой машины в состав
которой входит к.м.
Механизм
с коромыслом надежнее, но он уступает
своими габаритами
-
Выбор
закона движения ведомого звена
|
Кулачковые |
А. |
|
Б. |
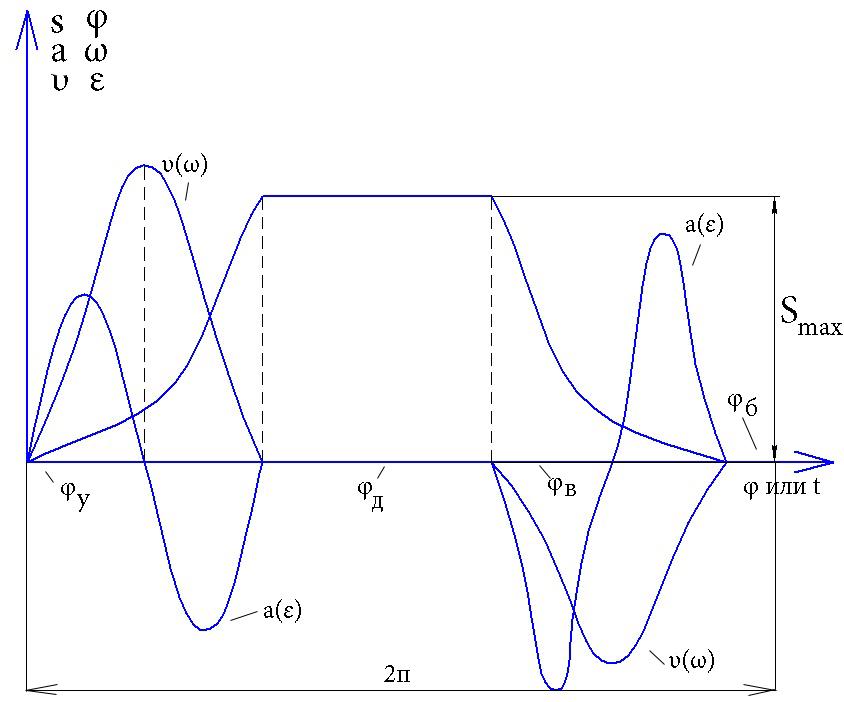
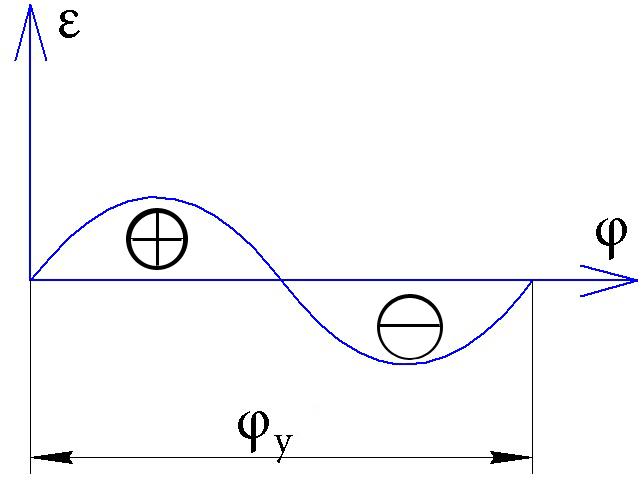
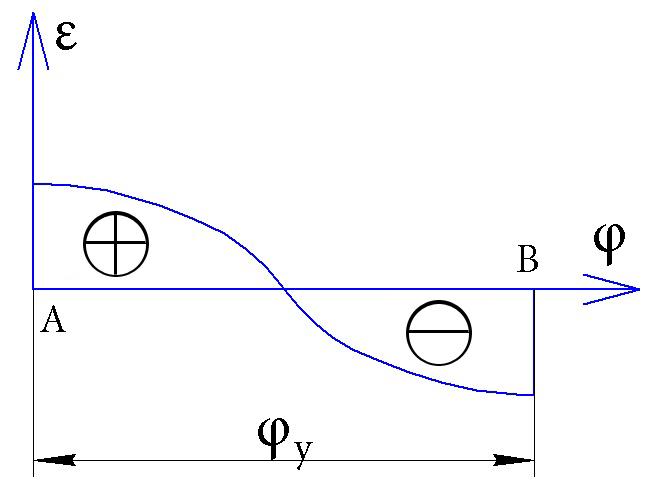
Здесь
необходимо учитывать два требования:
а)
требования технологического процесса
(φд
φ φв
φб
φmax
) и т.д.
б)
требования плавности и их безударной
работы. Обычно задаются формой графика
ускорения (или его аналога) ведомого
звена:
из
закона Ньютона:
![]() или
или
![]()
|
|
F~a |
|
← пример |
Необходимо
помнить, что жесткие удары (скачки
скорости) недопустимы, а мягкие удары
(скачки ускорения) в тихоходном механизме
допускаются.
|
|
-
Выбор
основных размеров механизма
Основные
размеры : для механизма с толкателем
|
|
ro, Для ro, Rролика |
Указанные
размеры должны определяться с учетом
условия оптимального угла давления α
|
|
[α] |
|
[α] |
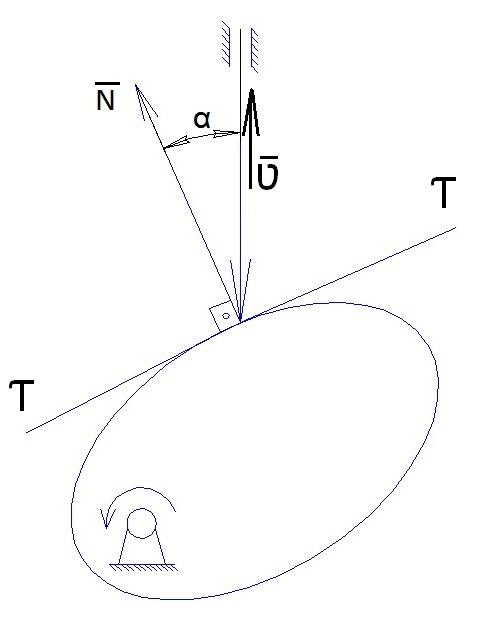
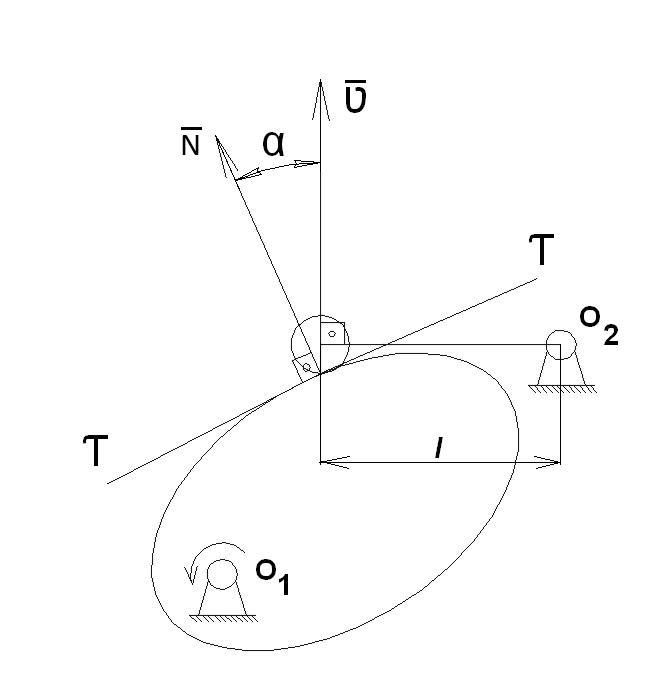
Связь
между основными размерами и α
(на
примере механизма с толкателем)
N-N
– нормаль к поверхности кулачка в точке
касания
τ-τ
– касательная к поверхности кулачка в
точке касания
|
|
Из
Из А
|
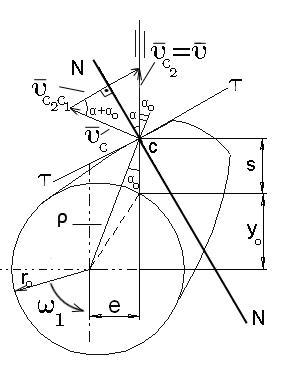
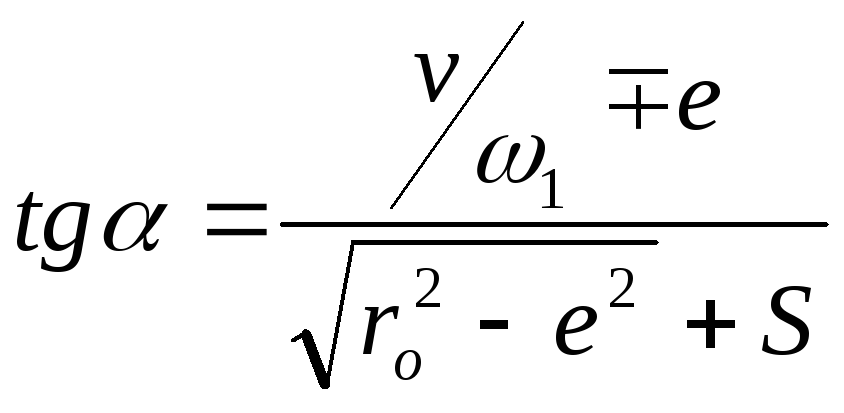 (2)
(2)
Знак
“-” соответствует положительному
значению эксцентриситета
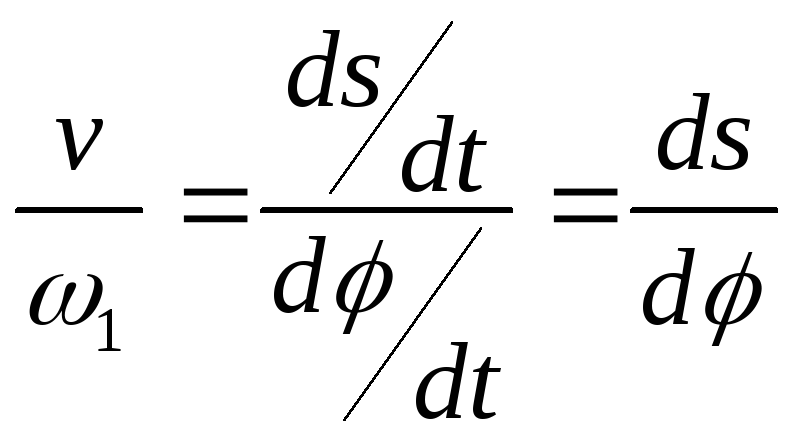
![]() —
—
является аналогом скорости толкателя
и не зависит от ω1,
т.к.
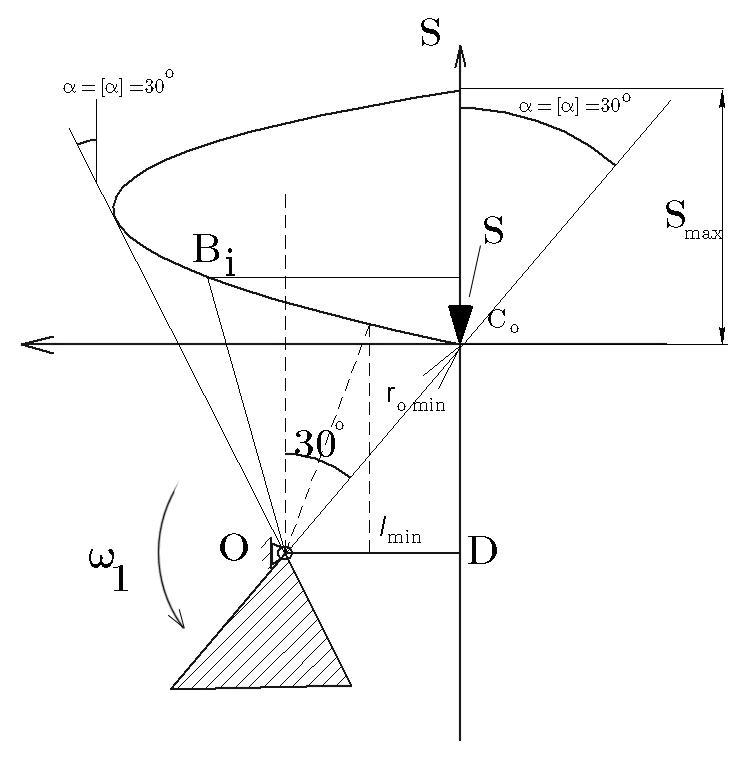
Выбор
значений ro
и e
с учетом (1) и (2) можно произвести с помощью
графических построений. На примере К.М.
с толкателем при силовом замыкании (нас
интересует только фаза удаления, т.к.
на фазе возврата сила не приводит к
заклиниванию, для К.М. с геометрическим
замыканием указанное ниже построении
надо проделать и для фазы возврата).
|
|
Подробно |
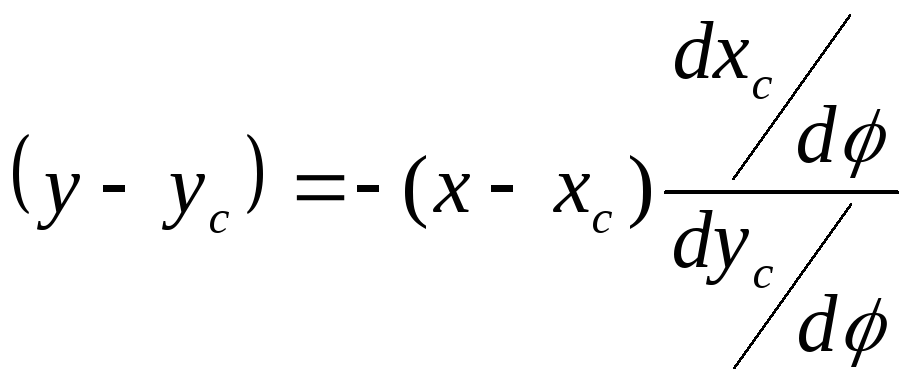
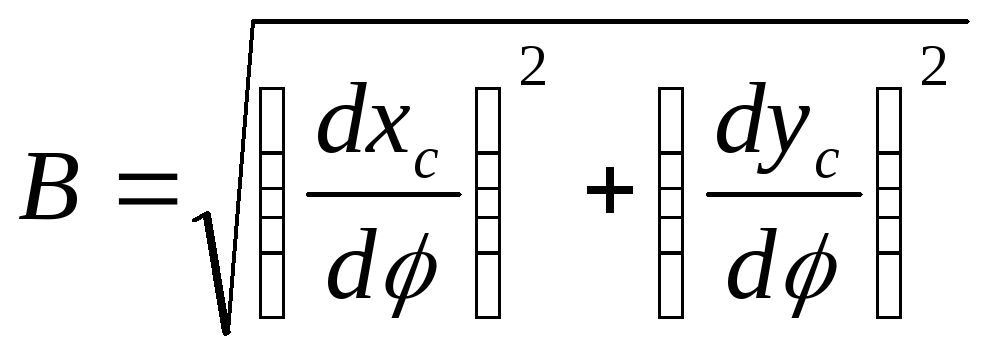
Построение
профиля кулачка
Профилирование
кулачка – последний этап синтеза
кулачкового механизма.
Построение
обычно выполняется методом инверсии
(кулачек неподвижен, и вращается
толкателем или коромыслом)
Графическим
или аналитическим способом. Графический
способ прост, нагляден, но недостаточно
точен. Рассмотрим аналитический способ:
|
|
Необходимо
Введем
(.) Проектируя |
|
|
(4) |
|
Где |
Профиль
ролика будет в обращенном движении
занимать положения в виде семейства
окружностей.
![]() (5)
(5)
Рабочий
профиль кулачка является внутренней
(реже внешней) огибающей этого семейства,
и для ее нахождения нужно продифференцировать
(5) по φ
Имеем:
![]() (6)
(6)
где
![]() ;
;
![]()
определяются
из (4)
![]()
![]()
Из
(6) выразим
 (7)
(7)
После
подстановки (7) в (5) найдем уравнение
рабочего профиля кулачка в декартовых
координатах:
|
|
(8) |
|
|
Где
 а верхний знак соответствует внутренней
а верхний знак соответствует внутренней
огибающей
В
полярных координатах
![]() ;
;
![]()
Легко
задать в виде программы для станков с
ЧПУ.
Тема
№5. Механические передачи трением
(Фрикционные передачи)
Предназначены
для преобразования вращательного
движения. В передачах данного типа
ведомый элемент приводится в движение
силами трения. Фрикционные передачи
бывают с жесткими
и гибкими
звеньями;
регулируемыми
и нерегулируемыми.
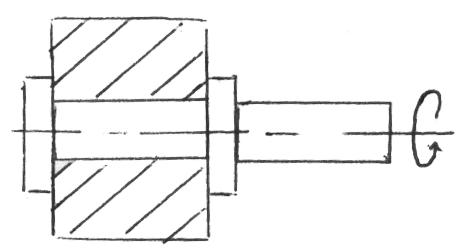
Простейшие
передачи с нерегулируемым передаточным
отношением ( i
= const),
состоят из двух цилиндрических или
конических тел вращения.
|
|
|
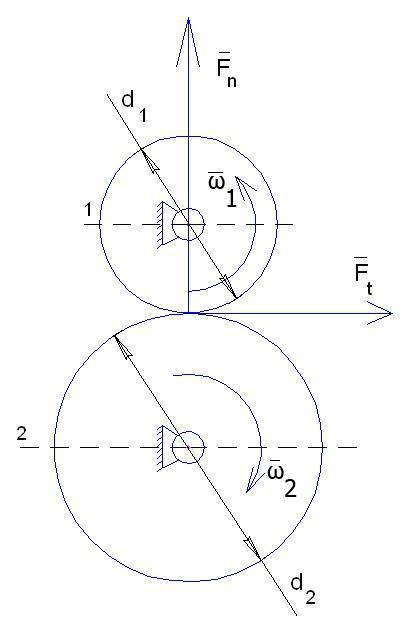
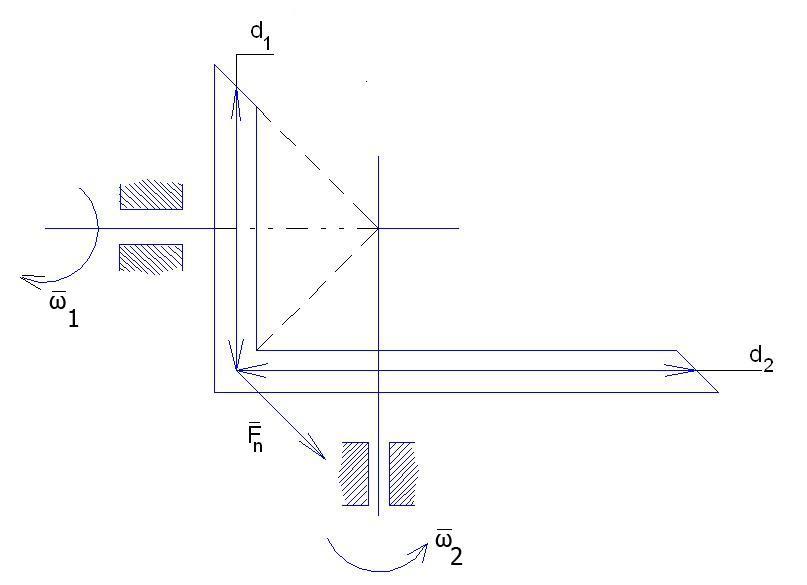
Передаточное
отношение этих передач определяется:
![]() ;
;
![]() ,
,
Где
![]() – коэффициент, учитывающий скольжение
– коэффициент, учитывающий скольжение
в передачах.
Для
того чтобы передать необходимое окружное
усилие
![]() (передать крутящий момент), необходимое
(передать крутящий момент), необходимое
нормальное усилие прижатия тел качения
определяется,
![]()
Где
![]() – коэффициент трения скольжения (зависит
– коэффициент трения скольжения (зависит
от материалов из которых выполнена пара
вращения).
![]() – коэффициент запаса сцепления, обычно
– коэффициент запаса сцепления, обычно
принимается![]()
Указанную
силу прижатия
![]() можно обеспечить постоянно, но тогда
можно обеспечить постоянно, но тогда
при уменьшении![]() передача будет работать с недогрузкой
передача будет работать с недогрузкой
и повышенными потерями на трение. Для
повышения долговечности и снижения
потерь на трение используются устройства,
где![]() — регулируется, т.е. изменяется
— регулируется, т.е. изменяется
пропорционально изменению![]()
Достоинства
фрикционных передач:
-
Относительная
простота передачи -
Высокие
угловые скорости вращения звеньев -
Плавность
передачи движения, бесшумность при
работе -
Обладают
достаточной точностью передаточного
числа
Недостатки
фрикционных передач:
-
Невысокая
несущая способность (увеличение несущей
способности приводит к увеличению
габаритов передачи и ее инерционности
до
 квт
квт
. -
Относительно
низкий КПД (до
 )
) -
Значительные
нагрузки на валы и подшипники -
Из
за наличия скольжения в звеньях, не
могут применяться в конструкциях,
которые должны удовлетворять требованиям
длительного поддержания постоянства
передаточного числа.
Виды
скольжения во фрикционных передачах
Существуют
три вида скольжения: упругое скольжение,
буксование и геометрическое скольжение.
Упругое
скольжение связано
с особенностями упругих деформаций на
площадке контакты 2 вн
в условиях сил трения, возникающих при
перекатывании сопряженных поверхностей
фрикционной пары.
|
|
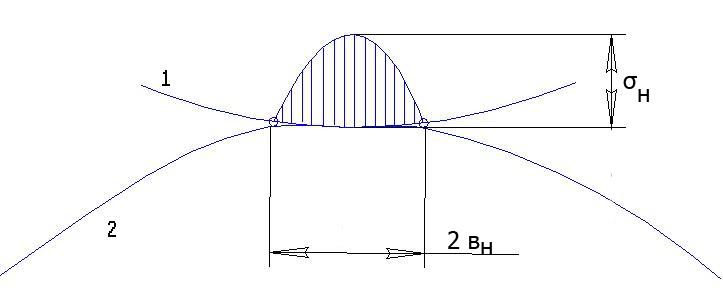
При
входе в зону контакта под действием сил
трения
![]() в поверхностных слоях ведущего и ведомого
в поверхностных слоях ведущего и ведомого
роликов возникают деформации сдвига.
Разность деформаций контактирующих
тел приводит к упругому скольжению,
величина которого зависит от модуля
упругости материалов и нормальной
нагрузки. Обычно величина упругого
скольжения не велика (для пары “сталь-сталь”
– 0.2 %, “текстолит-сталь” – 1% от
номинального значения окружной скорости
звеньев) и увеличивается с уменьшением
упругости звена. Поэтому КПД фрикционных
передач тем меньше, чем мягче материал
звеньев.
Буксование
является опасным видом скольжения,
возникающим тогда, когда движущий
момент, возникающий в зоне контакта
недостаточен для преодоления внешней
нагрузки. На поверхностях пар трения
образуются задиры, лыски, имеет место
местный интенсивный износ соприкасающихся
поверхностей. Допускать буксование
передачи нельзя.
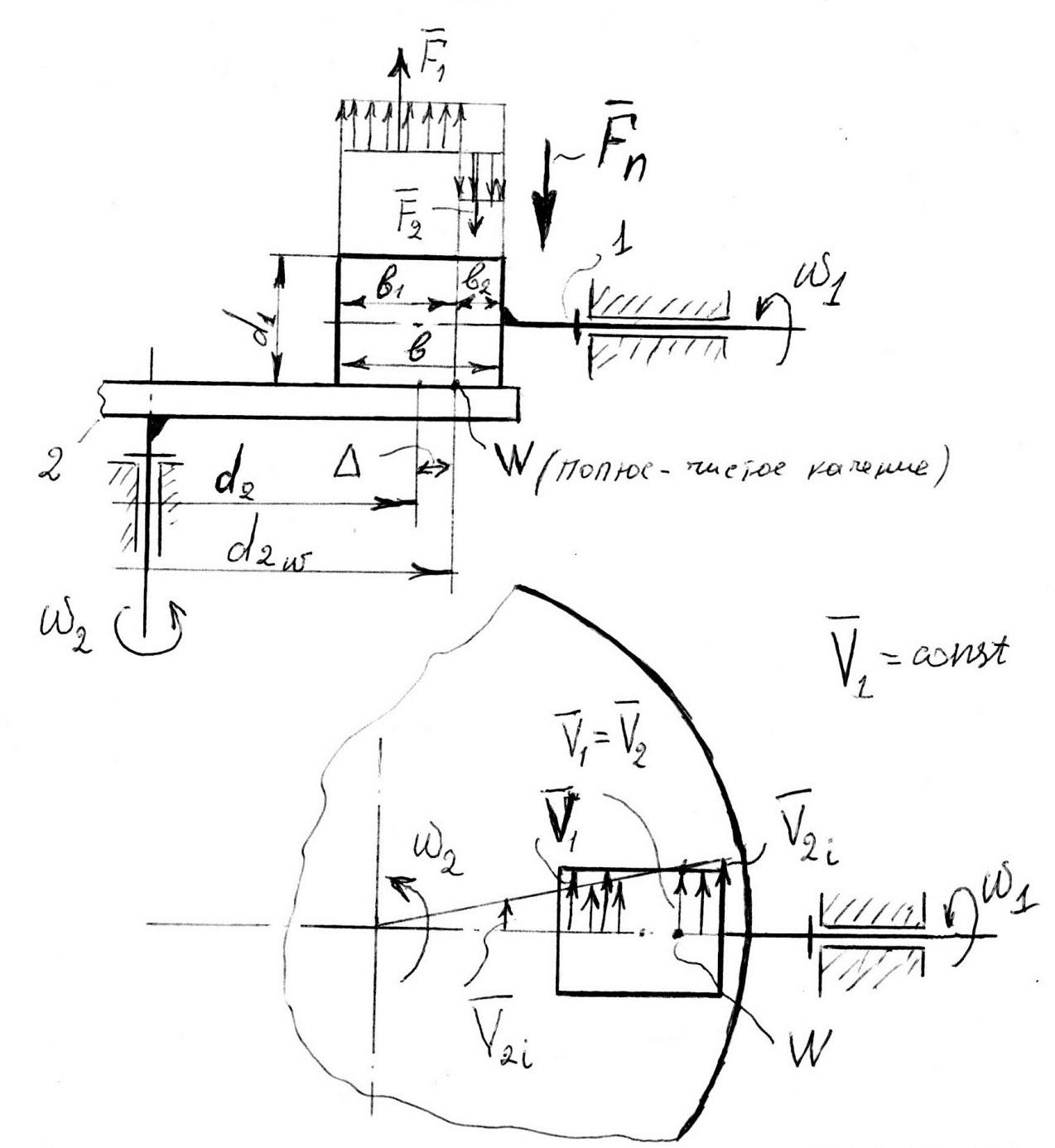
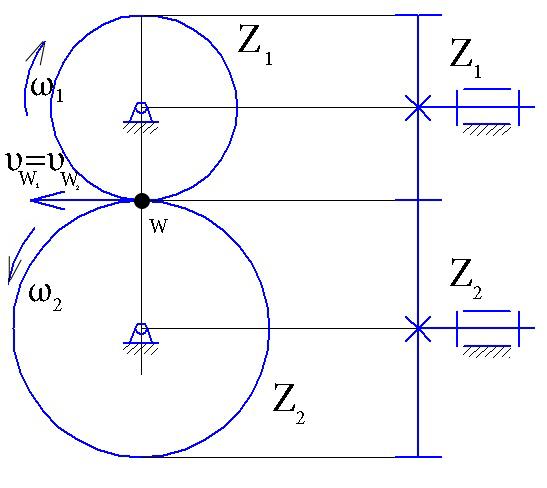
Геометрическое
скольжение
характерно для фрикционных пар как с
линейчатым так и с первоначальным
точечным контактом и вызвано несовпадением
по величине и по направлению скоростей
контактирующих точек ведущего и ведомого
роликов. В передачах с цилиндрическими
роликами, оси которых параллельны и
коническими с совпадающими вершинами
конусов геометрическое скольжение
отсутствует.
Рассмотрим
геометрическое скольжение на примере
фрикционной пары с прямолинейными
образующими:
![]()
Окончательно
![]() ,
,
где![]()
Определим
величину
![]()
через ![]() и
и![]() ,
,
получим
![]()
Передаточное
число передачи определяется
![]() ,
,
Где
знак (+) относится к случаю когда ролик
ведущее звено, (-) – когда ведомое.
Из
формулы видно, что при
![]() и
и![]() изменяется величина
изменяется величина![]() ,
,
что приводит к изменениюi.
С ростом нагрузки увеличивается
![]() и полюс перемещается к краю участка
и полюс перемещается к краю участка
увеличивая передаточное отношение. При
достижении![]() определенного значения наступает
определенного значения наступает
буксование.
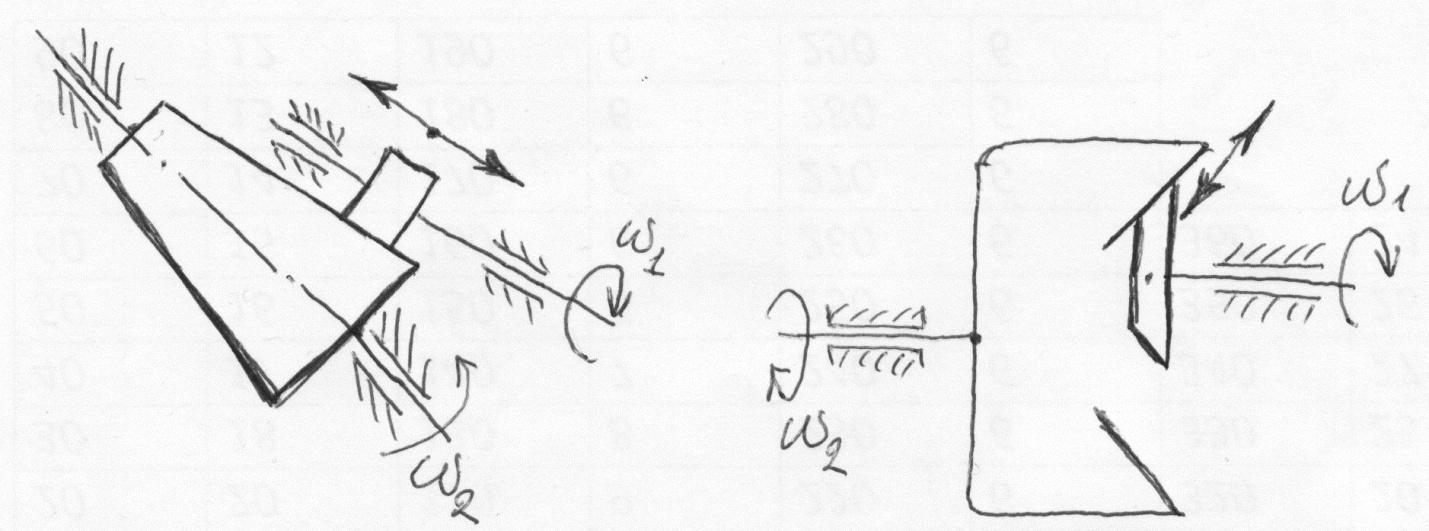
Регулируемые
фрикционные передачи (вариаторы)
Фрикционные
вариаторы можно разделить на три основные
типа:
-
С
непосредственным контактом ведущего
и ведомого звеньев -
С
промежуточными элементами -
Планетарные
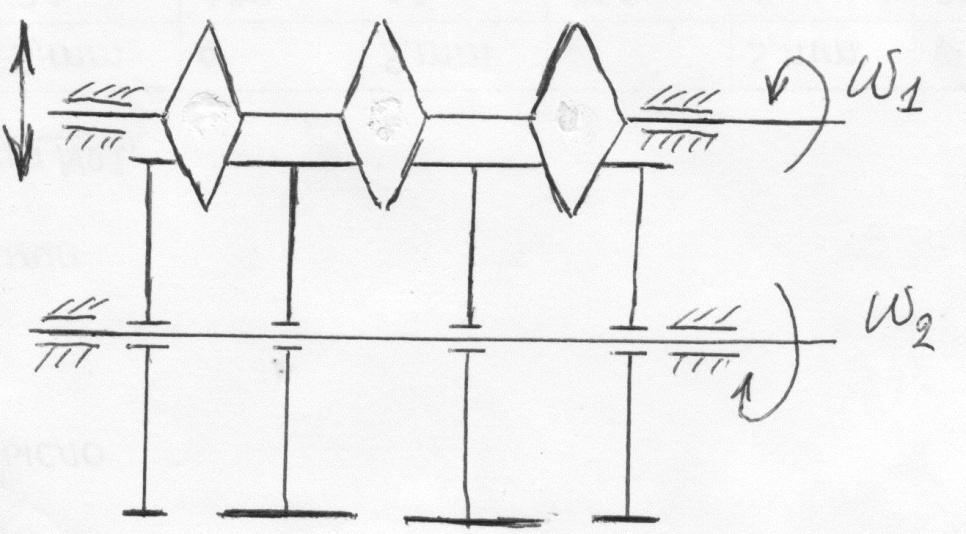
Вариаторы
первого типа (схематичное изображение)
Многопоточный
вариатор
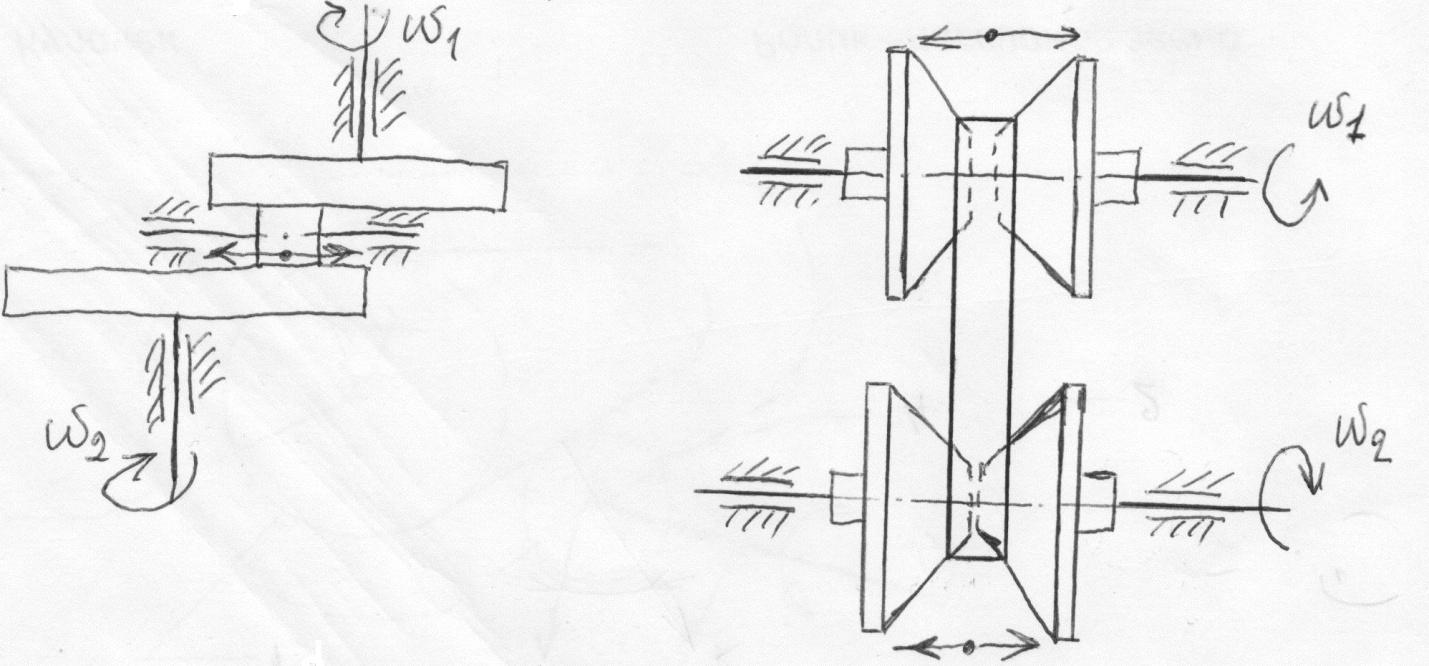
Вариаторы
второго типа
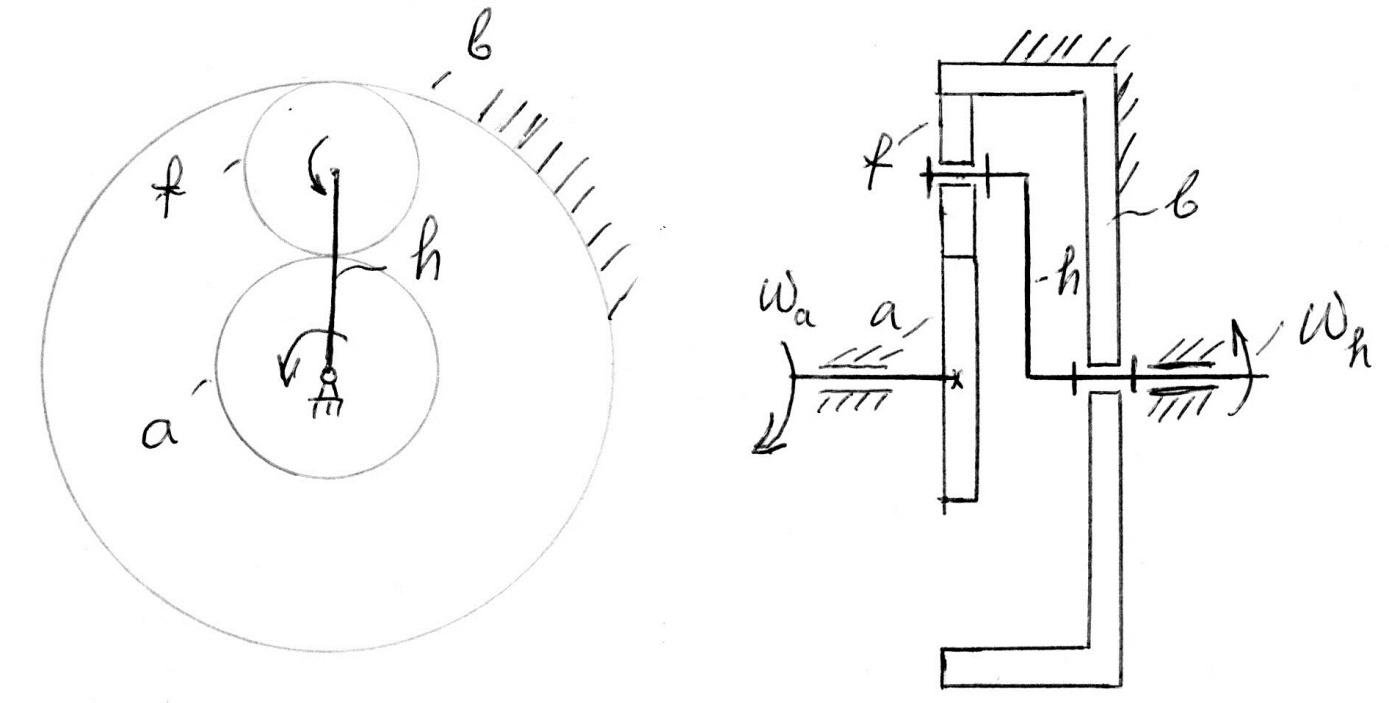
Вариаторы
третьего типа
В
вариаторах первого типа изменение i
осуществляется относительным перемещением
ведомого и ведущего звена. С увеличением
диапазона регулирования ![]()
, возрастает геометрическое скольжение
и размеры (габариты) передачи, поэтому
обычно ![]() .
.
В
вариаторах второго типа имеется
возможность увеличения ![]()
за счет одновременного изменения
радиусов ведущего и ведомого звеньев.
Диапозон регулирования вариаторов
данного типа может достигать значений
![]() .
.
В
вариаторах третьего типа аналогия с
планетарными зубчатыми механизмами,
но здесь имеется принципиальная
возможность изменять геометрические
параметры как основных звеньев (a,b,h)
так и сателлитов (f).
Конструкция данных вариаторов достаточно
сложна.
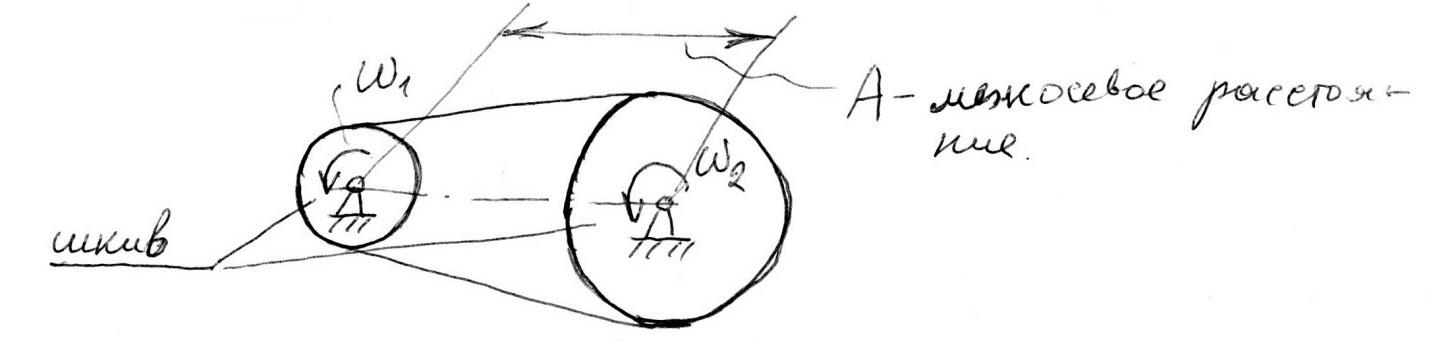
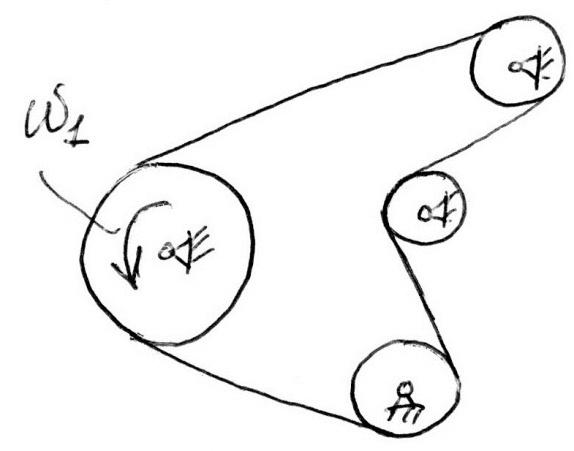
Ременные
передачи (фрикционные передачи с гибкой
связью)
Ременная
передача состоит из двух шкивов и
охватывающего ремня.
Подразделяются
на: 1 – плоскоременные, 2 – клиноременные,
3 – поликлиноременные, 4 — круглоременные,
5 – зубчатоременные.
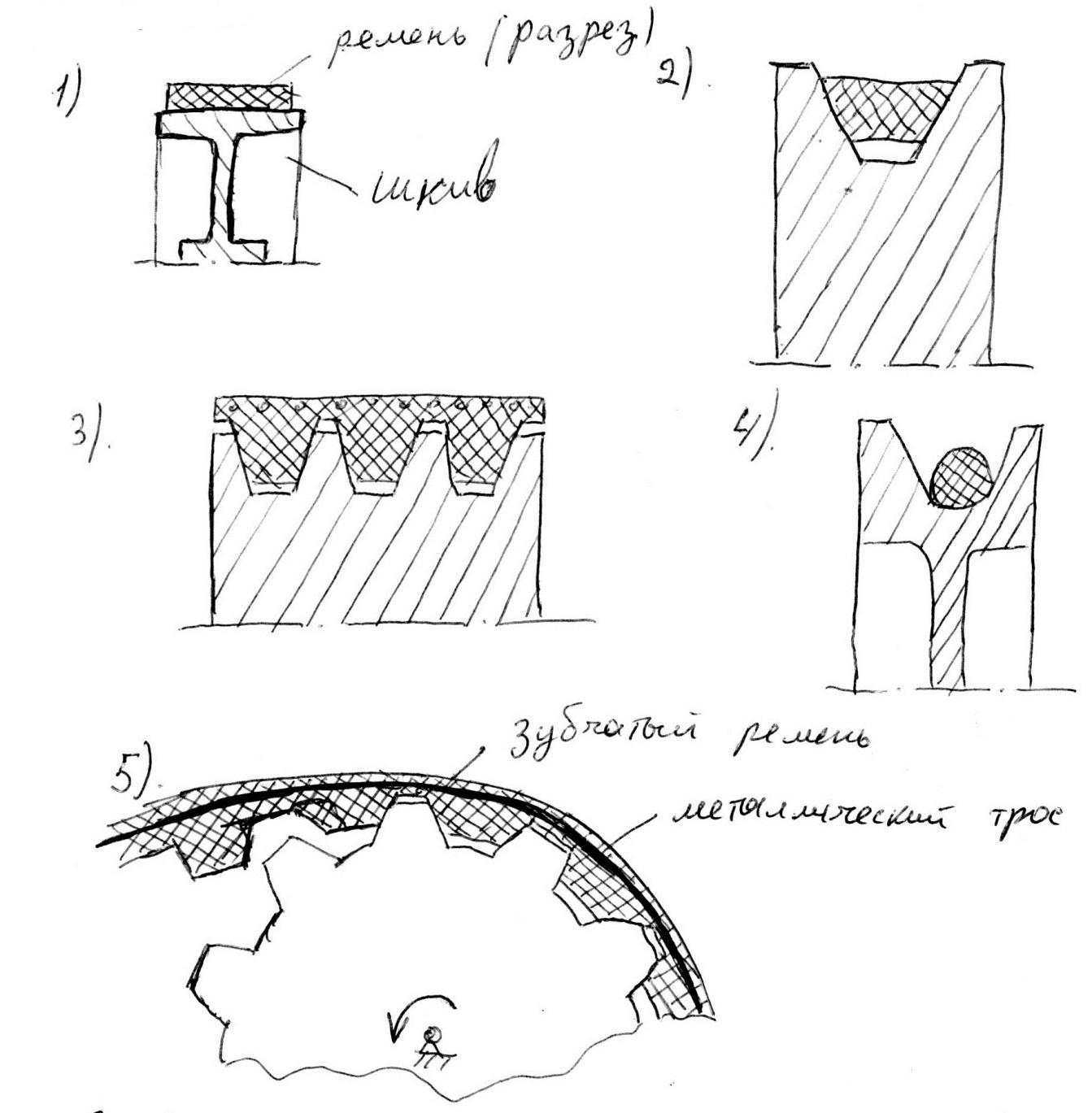
Первые
четыре типа передачи используют усилие
трения для передачи крутящего момента.
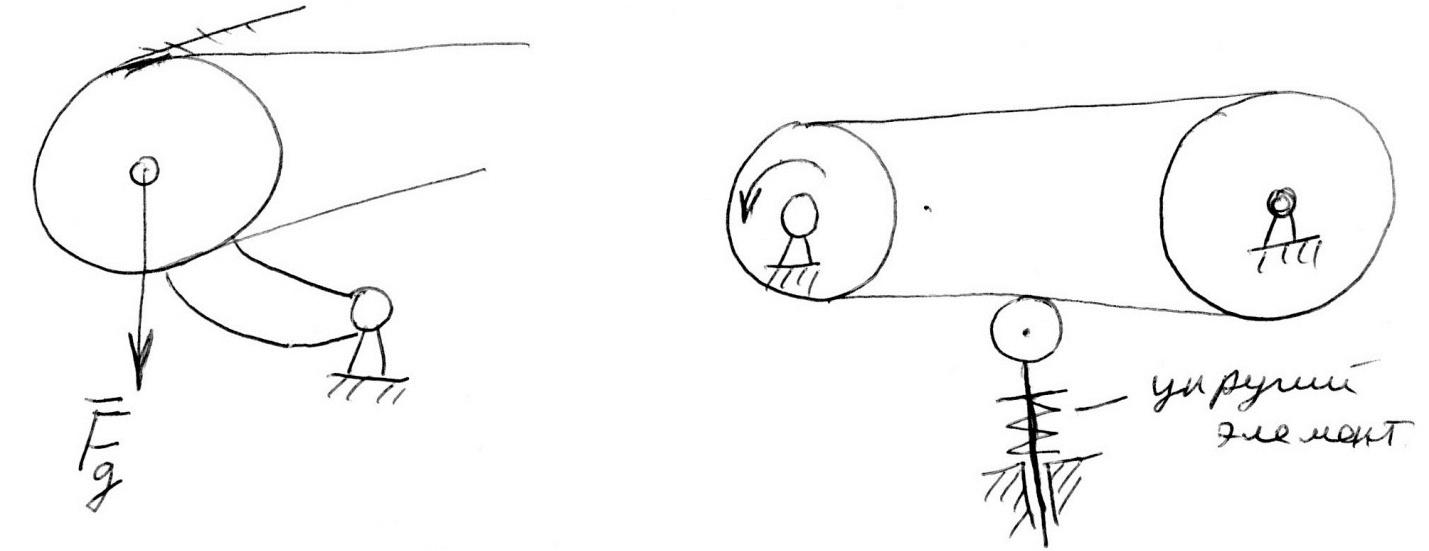
Усилие трения, необходимое для передачи
рабочей нагрузки создаются обычно
предварительным натяжением ремня за
счет регулирования межосевого расстояния
(А). Используется также автоматически
создаваемое натяжение, например за счет
силы веса или усилия упругого элемента.
Достоинства
ременных передач:
-
Плавность
и бесшумность работы -
Возможность
передачи энергии от одного вала к
другому при значительном расстоянии
между ними при простой конструктивной
схеме механизма -
Относительно
малые нагрузки на опоры валов -
Пониженные
требования к точности взаимного
расположения осей валов -
Ввиду
податливости ремня смягчаются толчки
и удары при работе.
Простота предохранения
от перегрузок за счет проскальзывания
(буксования) (за исключением зубчатоременной
передачи) -
Отсутствует
необходимость в смазке
Недостатки:
-
Непостоянство
передаточного отношения, вызванное
упругим скольжением, накладывает
ограничения на их использование, за
исключением зубчатоременных -
Значительные
габариты (например по сравнению с
зубчатыми) и эксплуатационные расходы,
связанные со сравнительно большими
потерями на трение и низкой (относительно)
долговечностью ремней ( часов).
часов).
Ременные
передачи используются при передаче
небольших мощностей (обычно ![]() кВт),
кВт),
и как правило для быстроходной ступени
передачи т.к. в этом случае их важнейший
недостаток (большие габариты) оказывает
наименьшее влияние на габариты и массу
передаточного механизма в целом.
Передаточное отношение ![]() .
.
Важнейшее
звено ременной передачи – гибкая связь
(ремня)
Плоски
ремни.
выполняются из различных материалов.
Ремни из кожи и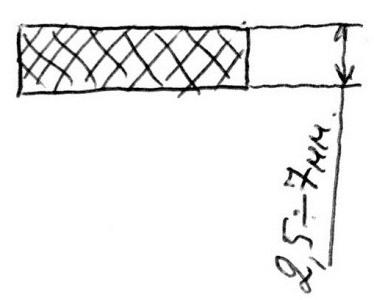 меют
меют
наибольшее тяговое усилие, но стоимость
их велика. Линейная скорость движения![]() .
.
Плоские ремни из прорезиненных материалов
(хлопчатобумажная или синтетическая
ткань – основа ремня) обладают повышенным
![]()
и износостойкостью. Работают при
скоростях до ![]() и
и
могут передавать мощности до 300 кВт .
К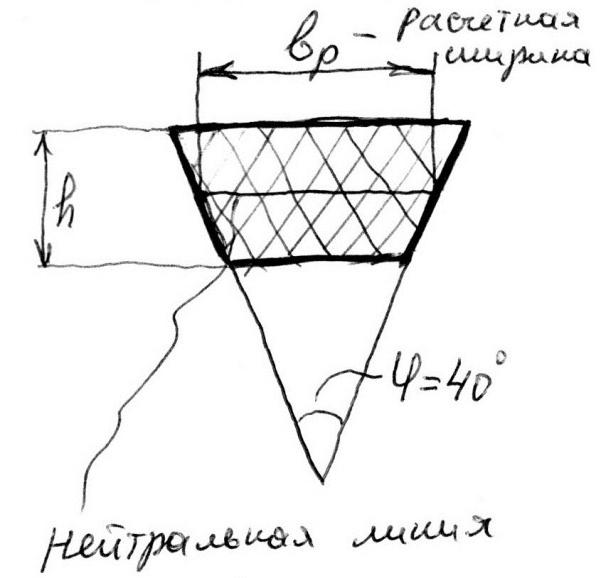 линовые
линовые
ремни.
Имеют сечение трапецеидальной формы.
В зависимости от величины отношения
![]() изготавливают три вида ремней: нормального
изготавливают три вида ремней: нормального
сечения![]()
, узкого ![]()
и широкого ![]() .
.
Стандартизированы ремни нормального
сечения, применяемые при скоростях ![]()
. Узкие ремни имеют повышенную тяговую
способность из-за лучшего распределения
нагрузки по ширине несущего слоя.
Допустимая скорость порядка ![]() .
.
Клиновые ремни применяются при
передаточных отношениях ![]() .
.
Благодаря эффекту клина тяговая
способность их выше чем у плоских ремней,
что обуславливает меньшие габариты.
Недостаток клиновых ремней – большие
потери на трение и напряжения изгиба в
сечении ремня.
Поликлиновые
ремни.
Эти ремни сочетают достоинства плоских
и клиновых ремней, из-за чего диаметр
ведущего шкива можно назначать меньшим
и увеличить передаточное отношение до
15.
Круглые
ремни.
Используются в маломощных до 0,5 кВт
(приборных) передачах. Круглые ремни,
как правило, представляют собой резиновые
кольца круглого сечения и различного
диаметра.
Зубчатые
ремни.
Имеют тянущий элемент в виде металлического
троса, находящегося в резиновой или
пластмассовой основе. Используются при
скоростях ![]()
передаточных отношениях ![]()
и мощностях до 100 кВт.
Ременные
передачи позволяют передавать мощность
одновременно на несколько валов.
Тема
№6 Зубчатые
механизмы
Звенья
механизмов взаимодействуют друг с
другом с помощью специальных зубьев
(выступов). Основное назначение ЗМ –
передача вращения с одного вала на
другой с одновременным изменением
скорости по величине или (и) направлению.
При этом обратнопропорционально
изменяется момент. Устройство для
понижения скорости – называется
редуктором,
если скорость повышается – то это
мультипликатор.
З.М.
широко распространены в узлах машин,
имеют преимущества по сравнению с
другими механизмами (ременными, цепными,
фрикционными и т.д)
Две
характеристики З.М. :
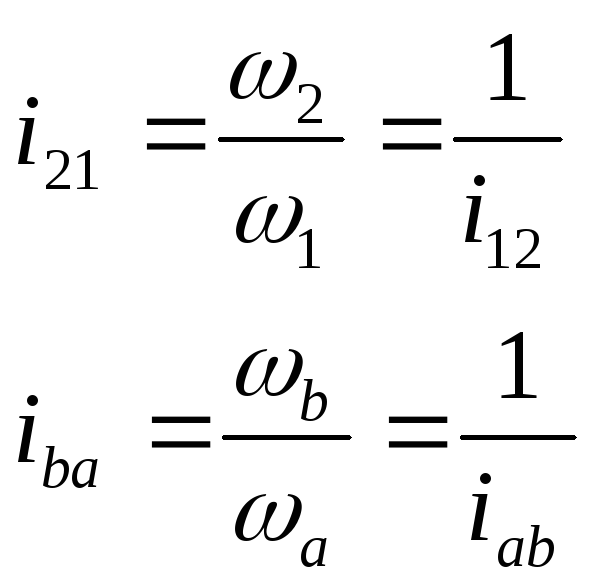
1)
Передаточным отношением называется
отношение угловых скоростей 2-х любых
валов механизма
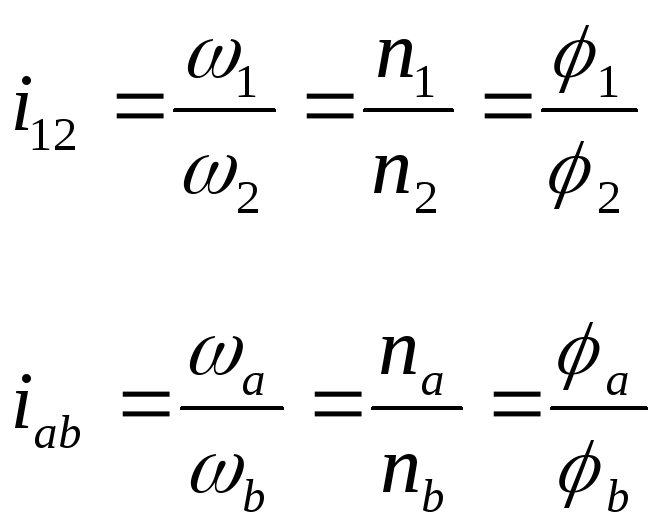 (1)
(1)
Передаточное
отношение относится к паре сопряженных
колес или к какой то части механизма
 (2)
(2)
Если
оси валов 1 и 2 параллельны, то передаточному
отношению присваивают знак “+” , если
![]() ; знак “-“ если
; знак “-“ если
![]()
.
Если
оси не параллельны, то знак теряет смысл.
2)
Передаточное число (u)
|
|
z2 |
|
z1 |
И
всегда положительно и относится к паре
сопряженных колес
![]() (4)
(4)
О
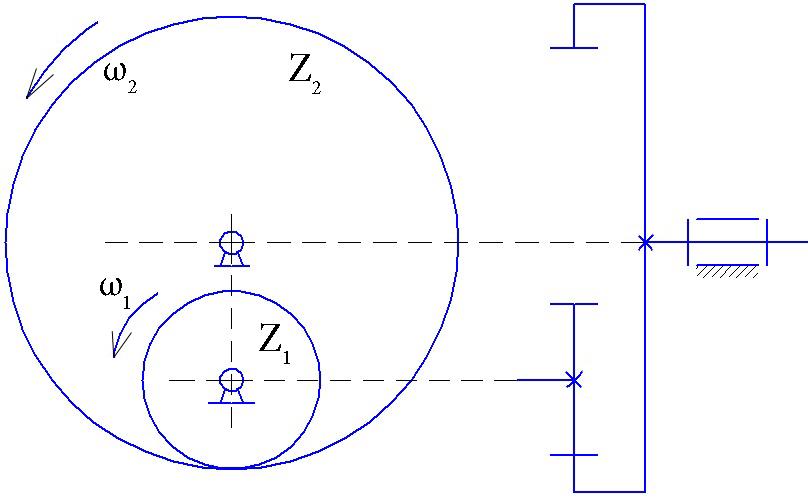
классификации зубчатых механизмов
1
– механизмы с неподвижными осями
2
– планетарные
3
– волновые
1.
Геометрические оси колес в процессе
работы остаются неподвижными
Геометрическая
ось – воображаемая линия, вокруг которой
происходит движение, не передает Мкр
(вал передает Мкр)
Простейшие
механизмы состоят только из 3-х звеньев;
стойки из 2-х подвижных звеньев с зубьями
(колесо, сектор, зубчатая рейка)
![]()
А)
Внешнее зацепление: (наиболее широко
применяется)
|
|
d W- |
|
|
|
|
Из Коэффициент |
|
|
|
f |
|
η
|
ξα |
Б)
Внутреннее зацепление
|
|
|
|
Достоинства: |
|
|
|
|
|
Недостатки: Сужены |
|
|
1,2 |
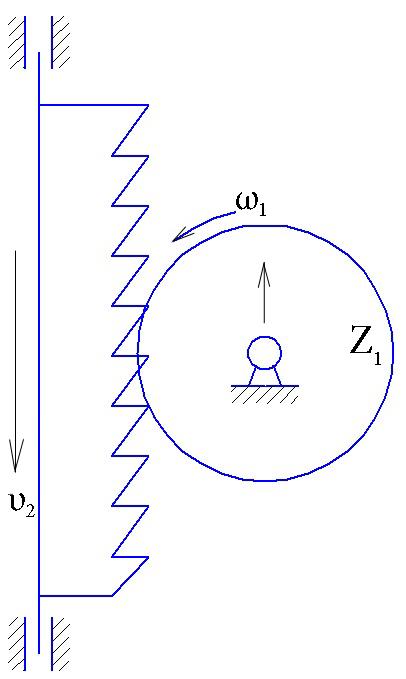
В)
Реечное зацепление
Реечное
зацепление широко применяется в технике
( сверла станков и т.д.)
|
|
|
|
Реечное |
 (7)
(7)
Особое
значение – нарезание зубчатых колес
Подготовка к экзамену по прикмеху



Прикладная механика
1. Диаграмма одноосного растяжения цилиндрического образца из упругопластического
материала.
2. Степень статической неопределимости системы. Раскрытие статической
неопределимости
методом сил.
3. Расчет статически неопределимых плоских рам методом сил.
4. Использование свойств симметрии при раскрытии статической неопределимости.
5. Определение перемещений в
статически неопределимых стержневых системах.
Привести примеры.
6. Определение перемещений в статически неопределимых балках.
7. Определение перемещений в статически неопределимых рамах.
8. Способы проверки правильности раскрытия статической неопределимости стержневых
систем. Привести примеры.
9. Теория напряженного состояния. Понятие о тензоре напряжений. Вывод формулы для
определения напряжения на произвольной площадке, проходящей через точку.
10. Теория напряженного состояния. Вывод уравнения для определения главных
напряжений в общем случае напряженного состояния. Инварианты тензора напряжений.
11. Напряженное состояние в точке тела. Главные площадки и главные напряжения.
Примеры напряженных состояний.
12. Вывести формулы для определения главных напряжений в случае, если одно главное
напряжение известно.
13. Разделение тензора напряжений на шаровой тензор и девиатор напряжений.
14. Теория напряженного состояния. Круговая диаграмма О. Мора.
15. Круговая диаграмма напряженного состояния.
Наибольшее касательное напряжение.
16. Обобщенный закон Гука для изотропного материала.
17. Относительное изменение объема. Вывод формулы.
18. Вывести формулу для определения удельной потенциальной энергии упругой
деформации в общем случае напряженного состояния.
19. Понятие эквивалентного напряжения. Определение. Коэффициент запаса для
сложного напряженного состояния.
20. Расчет на прочность при сложном напряженном состоянии.
21. Критериальные теории начала текучести. Вывод формул для вычисления
эквивалентного напряжения.
22. Теория разрушения О. Мора.
23. Вывод формул для вычисления эквивалентного напряжения в случае упрощенного
плоского напряженного состояния по двум теориям начала текучести и теории
разрушения О. Мора.
эквивалентного напряжения по двум теориям начала текучести.
25. Безмоментная теория расчета оболочек вращения. Вывод уравнения Лапласа.
26. Определение напряжений в тонкостенной сферической оболочке, нагруженной
равномерным внутренним давлением. Вывод формул.
27. Определение напряжений в тонкостенной цилиндрической оболочке, нагруженной
равномерным внутренним
давлением. Вывод формул.
28. Вывести формулы для определения напряжений в тонкостенной сферической
оболочке, нагруженной равномерным внешним давлением.
29. Вывести формулы для определения напряжений в тонкостенной цилиндрической
оболочке при действии равномерного внутреннего и внешнего давления.
30. Вывести формулы для определения напряжений в тонкостенной цилиндрической
оболочке при действии равномерного внешнего давления.
31. Задача Ламе. Постановка задачи. Вывод дифференциального уравнения равновесия
элемента трубы.
32. Задача Ламе. Постановка задачи. Вывести уравнение совместности деформаций.
33. Вывод общего решения задачи Ламе в напряжениях.
34. Частный случай задачи Ламе. Вывести формулы для напряжений в толстостенной
трубе, нагруженной внешним давлением. Построить эпюры о
кружных и радиальных
напряжений.
35. Частный случай задачи Ламе. Вывести формулы для напряжений в толстостенной
трубе, нагруженной внутренним давлением. Построить эпюры окружных и радиальных
напряжений.
36. Частный случай задачи Ламе. Вывод формул для определения напряжений в
равномерно растянутой плите с отверстием. Коэффициент концентрации напряжений в
зоне отверстия. Построить эпюры окружных и радиальных напряжений.
37. Час
тный случай задачи Ламе. Вывод формул для определения напряжений в плите с
отверстием под действием внутреннего давления. Построить эпюры окружных и
радиальных напряжений.
38. Статический метод (метод Эйлера) решения задач уст
ойчивости стержня. Вывод
формулы для определения критической силы для шарнирно закрепленного стержня
(задача Эйлера).
39. Устойчивость сжатых стержней. Коэффициент приведения длины. Примеры определения коэффициента приведения длины.
40. Устойчивость сжатых стержней. Вывод формулы для вычисления критической силы
энергетическим методом.
41. Пределы применимости формулы Эйлера для вычисления критических нагрузок.
Определение значения гибкости стержня, до которого справедлива формула Эйлера.
График зависимости критических напряжений от гибкости. Определение критических
напряжений при малой гибкости стержня.
42. Расчет на устойчивость по коэффициенту п
онижения допускаемых напряжений.
43. Продольно-поперечный изгиб стержня. Использование дифференциального уравнения
упругой линии для определения прогибов стержня.
44. Продольно-поперечный изгиб стержня. Выв
од формулы С.П. Тимошенко для
приближенного определения прогибов.
45. Циклические нагрузки. Понятие об усталостной прочности.
46. Циклические нагрузки. Характеристики цикла.
47. Циклические нагрузки. Кривая усталости и предел выносливости.
48. Циклические нагрузки. Факторы, влияющие на сопротивление усталостному
разрушению. Способы повышения усталостной прочности деталей.